{"title":"Zero-Position Closed-Loop Control of Nuclear Spin in a K-Rb-\n \n \n \n \n 21\n \n Ne\n \n $^{21}{\\rm Ne}$\n Comagnetometer","authors":"Longyan Ma, Hongyu Pei, Lihong Duan, Xiaohan Ge, Wenfeng Fan, Wei Quan","doi":"10.1002/qute.202400432","DOIUrl":null,"url":null,"abstract":"<p>In SERF (spin-exchange relaxation-free) comagnetometers, the fluctuation of the atomic ensemble's polarization significantly impacts the long-term stability of the output signal. A real-time closed-loop control method for the nuclear spin polarization is proposed, and the measurement model is established using Kalman state observer. Furthermore, magnetic field control signals are generated using a proportional-integral-derivative (PID) strategy, which is then applied to the atomic ensemble to dynamically adjust the nuclear spin polarization. Finally, closed-loop control of nuclear spin polarization is achieved through continuous feedback and control. Moreover, experiments have demonstrated that implementing a closed-loop system for nuclear spin zero-position is conducive to reducing the sensitivity of the output signal to fluctuations in the external environment. The experimental results show that the Allan deviation at 100 s is reduced by <span></span><math>\n <semantics>\n <mrow>\n <mn>44.3</mn>\n <mo>%</mo>\n </mrow>\n <annotation>$44.3\\%$</annotation>\n </semantics></math>, and the sensitivity of inertial rotation measurement is significantly improved, that is, the noise level at 1 Hz is suppressed by approximately <span></span><math>\n <semantics>\n <mrow>\n <mn>60</mn>\n <mo>%</mo>\n </mrow>\n <annotation>$60\\%$</annotation>\n </semantics></math>.</p>","PeriodicalId":72073,"journal":{"name":"Advanced quantum technologies","volume":"8 7","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2025-03-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced quantum technologies","FirstCategoryId":"1085","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/qute.202400432","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"OPTICS","Score":null,"Total":0}
引用次数: 0
Abstract
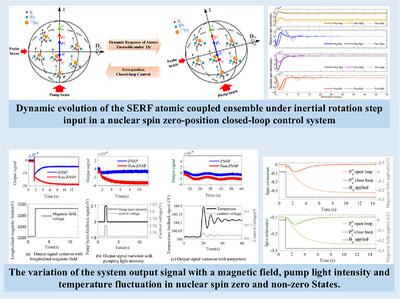
In SERF (spin-exchange relaxation-free) comagnetometers, the fluctuation of the atomic ensemble's polarization significantly impacts the long-term stability of the output signal. A real-time closed-loop control method for the nuclear spin polarization is proposed, and the measurement model is established using Kalman state observer. Furthermore, magnetic field control signals are generated using a proportional-integral-derivative (PID) strategy, which is then applied to the atomic ensemble to dynamically adjust the nuclear spin polarization. Finally, closed-loop control of nuclear spin polarization is achieved through continuous feedback and control. Moreover, experiments have demonstrated that implementing a closed-loop system for nuclear spin zero-position is conducive to reducing the sensitivity of the output signal to fluctuations in the external environment. The experimental results show that the Allan deviation at 100 s is reduced by , and the sensitivity of inertial rotation measurement is significantly improved, that is, the noise level at 1 Hz is suppressed by approximately .




 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


