Xueqin Ji, Shuting Zhao, Di Liu, Feng Wang, Xinrong Chen
{"title":"A robust and effective framework for 3D scene reconstruction and high-quality rendering in nasal endoscopy surgery.","authors":"Xueqin Ji, Shuting Zhao, Di Liu, Feng Wang, Xinrong Chen","doi":"10.3389/fnbot.2025.1630728","DOIUrl":null,"url":null,"abstract":"<p><p>In nasal endoscopic surgery, the narrow nasal cavity restricts the surgical field of view and the manipulation of surgical instruments. Therefore, precise real-time intraoperative navigation, which can provide precise 3D information, plays a crucial role in avoiding critical areas with dense blood vessels and nerves. Although significant progress has been made in endoscopic 3D reconstruction methods, their application in nasal scenarios still faces numerous challenges. On the one hand, there is a lack of high-quality, annotated nasal endoscopy datasets. On the other hand, issues such as motion blur and soft tissue deformations complicate the nasal endoscopy reconstruction process. To tackle these challenges, a series of nasal endoscopy examination videos are collected, and the pose information for each frame is recorded. Additionally, a novel model named Mip-EndoGS is proposed, which integrates 3D Gaussian Splatting for reconstruction and rendering and a diffusion module to reduce image blurring in endoscopic data. Meanwhile, by incorporating an adaptive low-pass filter into the rendering pipeline, the aliasing artifacts (jagged edges) are mitigated, which occur during the rendering process. Extensive quantitative and visual experiments show that the proposed model is capable of reconstructing 3D scenes within the nasal cavity in real-time, thereby offering surgeons more detailed and precise information about the surgical scene. Moreover, the proposed approach holds great potential for integration with AR-based surgical navigation systems to enhance intraoperative guidance.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1630728"},"PeriodicalIF":2.8000,"publicationDate":"2025-06-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12245865/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1630728","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
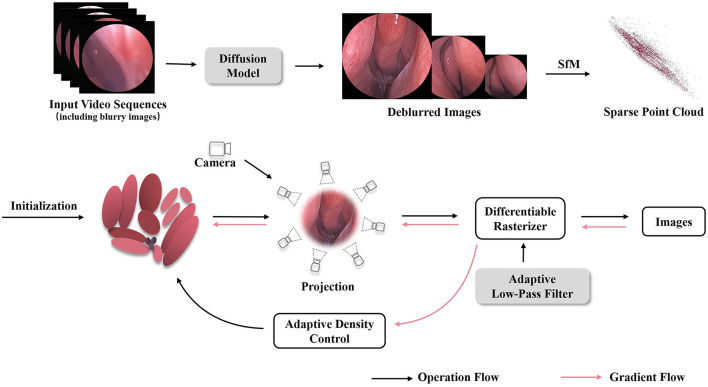
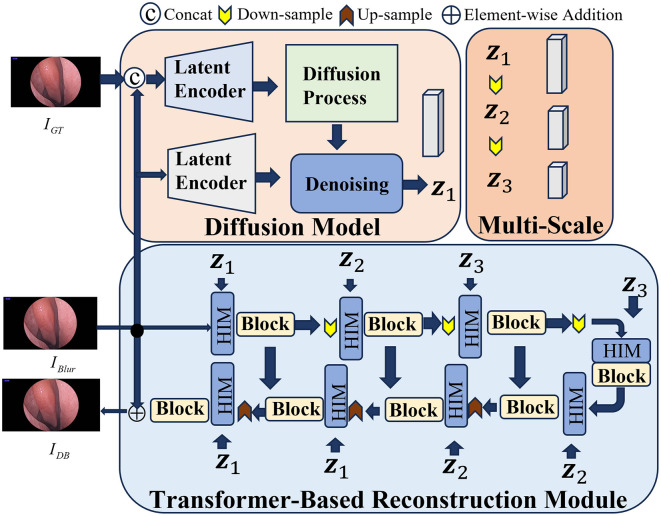
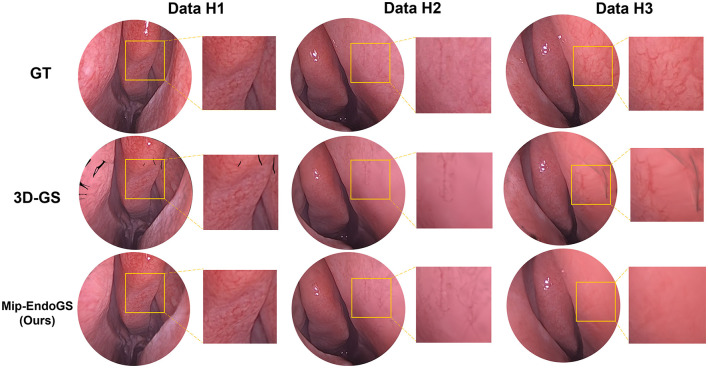
In nasal endoscopic surgery, the narrow nasal cavity restricts the surgical field of view and the manipulation of surgical instruments. Therefore, precise real-time intraoperative navigation, which can provide precise 3D information, plays a crucial role in avoiding critical areas with dense blood vessels and nerves. Although significant progress has been made in endoscopic 3D reconstruction methods, their application in nasal scenarios still faces numerous challenges. On the one hand, there is a lack of high-quality, annotated nasal endoscopy datasets. On the other hand, issues such as motion blur and soft tissue deformations complicate the nasal endoscopy reconstruction process. To tackle these challenges, a series of nasal endoscopy examination videos are collected, and the pose information for each frame is recorded. Additionally, a novel model named Mip-EndoGS is proposed, which integrates 3D Gaussian Splatting for reconstruction and rendering and a diffusion module to reduce image blurring in endoscopic data. Meanwhile, by incorporating an adaptive low-pass filter into the rendering pipeline, the aliasing artifacts (jagged edges) are mitigated, which occur during the rendering process. Extensive quantitative and visual experiments show that the proposed model is capable of reconstructing 3D scenes within the nasal cavity in real-time, thereby offering surgeons more detailed and precise information about the surgical scene. Moreover, the proposed approach holds great potential for integration with AR-based surgical navigation systems to enhance intraoperative guidance.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


