{"title":"Active interaction strategy generation for human-robot collaboration based on trust.","authors":"Yujie Guo, Pengfei Yi, Xiaopeng Wei, Dongsheng Zhou","doi":"10.1186/s42492-025-00198-7","DOIUrl":null,"url":null,"abstract":"<p><p>In human-robot collaborative tasks, human trust in robots can reduce resistance to them, thereby increasing the success rate of task execution. However, most existing studies have focused on improving the success rate of human-robot collaboration (HRC) rather than on enhancing collaboration efficiency. To improve the overall collaboration efficiency while maintaining a high success rate, this study proposes an active interaction strategy generation for HRC based on trust. First, a trust-based optimal robot strategy generation method was proposed to generate the robot's optimal strategy in a HRC. This method employs a tree to model the HRC process under different robot strategies and calculates the optimal strategy based on the modeling results for the robot to execute. Second, the robot's performance was evaluated to calculate human's trust in a robot. A robot performance evaluation method based on a visual language model was also proposed. The evaluation results were input into the trust model to compute human's current trust. Finally, each time an object operation was completed, the robot's performance evaluation and optimal strategy generation methods worked together to automatically generate the optimal strategy of the robot for the next step until the entire collaborative task was completed. The experimental results demonstrates that this method significantly improve collaborative efficiency, achieving a high success rate in HRC.</p>","PeriodicalId":29931,"journal":{"name":"Visual Computing for Industry Biomedicine and Art","volume":"8 1","pages":"16"},"PeriodicalIF":6.0000,"publicationDate":"2025-06-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12185789/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Visual Computing for Industry Biomedicine and Art","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1186/s42492-025-00198-7","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
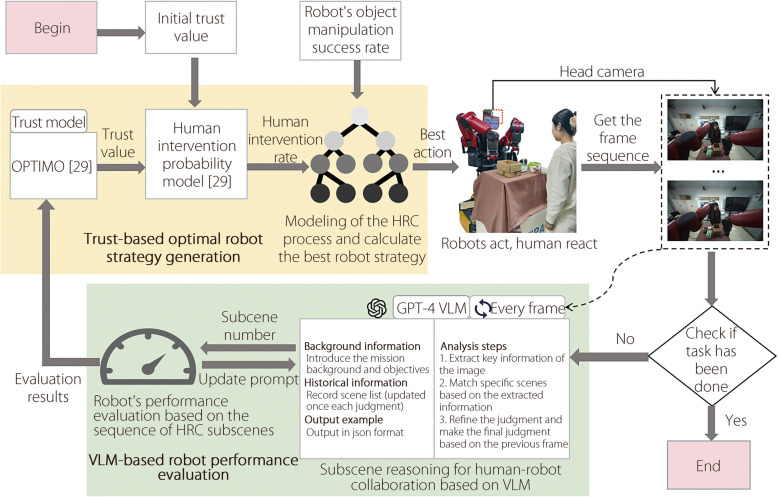
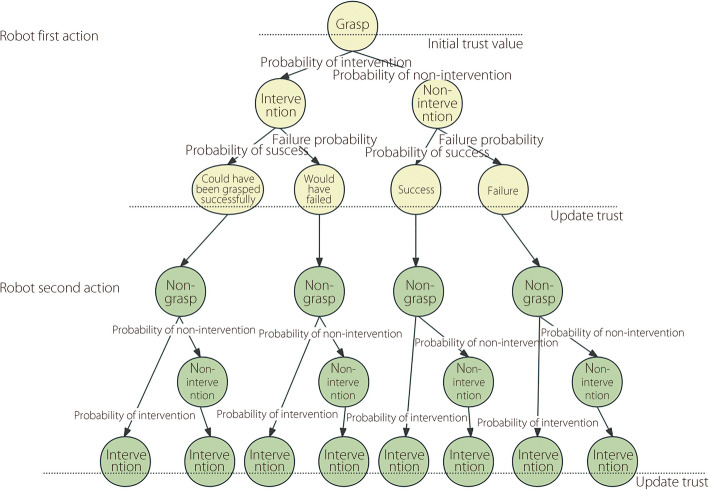
In human-robot collaborative tasks, human trust in robots can reduce resistance to them, thereby increasing the success rate of task execution. However, most existing studies have focused on improving the success rate of human-robot collaboration (HRC) rather than on enhancing collaboration efficiency. To improve the overall collaboration efficiency while maintaining a high success rate, this study proposes an active interaction strategy generation for HRC based on trust. First, a trust-based optimal robot strategy generation method was proposed to generate the robot's optimal strategy in a HRC. This method employs a tree to model the HRC process under different robot strategies and calculates the optimal strategy based on the modeling results for the robot to execute. Second, the robot's performance was evaluated to calculate human's trust in a robot. A robot performance evaluation method based on a visual language model was also proposed. The evaluation results were input into the trust model to compute human's current trust. Finally, each time an object operation was completed, the robot's performance evaluation and optimal strategy generation methods worked together to automatically generate the optimal strategy of the robot for the next step until the entire collaborative task was completed. The experimental results demonstrates that this method significantly improve collaborative efficiency, achieving a high success rate in HRC.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


