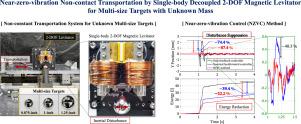
Near-zero-vibration non-contact transportation by single-body decoupled 2-DOF magnetic levitator for multi-size targets with unknown mass
IF 3.7
2区 工程技术
Q2 ENGINEERING, MANUFACTURING
Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology
Pub Date : 2025-06-23
DOI:10.1016/j.precisioneng.2025.06.009
引用次数: 0
Abstract
This paper presents a near-zero-vibration control (NZVC) method to significantly reduce the inertial disturbance for high-throughput non-contact transportation of multi-size levitated targets with unknown mass using a single-body 2-DOF magnetic levitation actuator. The proposed NZVC method is composed of two key components: (1) a parameter estimation algorithm designed to identify the target size with unknown mass and the associated changes in system dynamics, and (2) an adaptive feedforward controller, capable of compensating for inertial disturbances in the levitated targets during high-acceleration transportation. The proposed parameter estimation algorithm, which is based on the comprehensive system model that integrates the magnetic levitation actuator and the fiber optical sensor, enables accurate estimation of the size of the targets with an error of less than 1. The NZVC method, combined with an adaptive feedforward controller, achieves a maximum of 87.4 and 52.2 reduction in the target vibration and accumulated energy consumption by decreasing the current required to compensate for the undesired vibration from inertial disturbances during high-throughput non-contact transportation.
多尺寸未知质量目标单机解耦二自由度磁悬浮近零振动非接触输运
本文提出了一种近零振动控制(NZVC)方法,可显著降低多尺寸未知质量悬浮目标的单体二自由度高通量非接触运输中的惯性干扰。提出的NZVC方法由两个关键部分组成:(1)参数估计算法,用于识别未知质量的目标尺寸和相关的系统动力学变化;(2)自适应前馈控制器,用于补偿高加速度运输过程中悬浮目标的惯性扰动。提出的参数估计算法基于磁悬浮执行器和光纤传感器集成的综合系统模型,能够准确估计目标的尺寸,误差小于1%。NZVC方法与自适应前馈控制器相结合,通过降低补偿高吞吐量非接触运输过程中惯性干扰引起的不良振动所需的电流,实现了目标振动和累计能耗的最大减少87.4%和52.2%。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
7.40
自引率
5.60%
发文量
177
审稿时长
46 days
期刊介绍:
Precision Engineering - Journal of the International Societies for Precision Engineering and Nanotechnology is devoted to the multidisciplinary study and practice of high accuracy engineering, metrology, and manufacturing. The journal takes an integrated approach to all subjects related to research, design, manufacture, performance validation, and application of high precision machines, instruments, and components, including fundamental and applied research and development in manufacturing processes, fabrication technology, and advanced measurement science. The scope includes precision-engineered systems and supporting metrology over the full range of length scales, from atom-based nanotechnology and advanced lithographic technology to large-scale systems, including optical and radio telescopes and macrometrology.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


