HEXmorph: Fault tolerance against single and dual rotor failure using geometric morphing on hexacopter
IF 5.2
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
Abstract
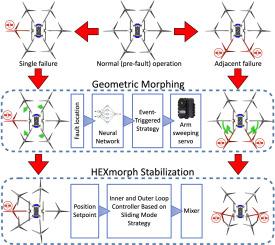
Rotor failure in hexacopters with alternating rotor configurations often results in propulsion asymmetry and destabilizing moments, which can lead to loss of hover stability and maneuverability. This paper introduces HEXmorph, a novel fault-tolerant hexacopter design that employs geometric morphing through arm sweeping to redistribute thrust and counteract the effects of single and adjacent rotor failures. The proposed system integrates two optimization strategies: Moment Optimized Solver (MOS) and Center of Mass Optimized Solver (COS), tailored to minimize attitude changes and maintain stability during morphing. A feed-forward neural network is utilized to predict servo angles for arm morphing, ensuring real-time adaptability. The morphing mechanism is governed by a global event-triggered sliding mode control, which locks servo movements within a predefined error threshold. At the same time, system stability is guaranteed using a Modified Nonsingular Terminal Sliding Mode Controller (MNTSMC). Simulation and experimental results demonstrate the ability of HEXmorph to maintain near-zero attitude static hover and maneuverability, even under scenarios involving up to two adjacent rotor failures. By combining hardware adaptability with robust control strategies, HEXmorph significantly advances fault tolerance for multi-rotor aerial systems.
HEXmorph:对单转子和双转子故障使用几何变形的六旋翼的容错
采用交变旋翼结构的六旋翼机旋翼故障往往会导致推进不对称和失稳力矩,从而导致悬停稳定性和机动性的丧失。本文介绍了一种新型的容错六旋翼机HEXmorph,该六旋翼机采用几何变形通过臂扫来重新分配推力并抵消单个和相邻转子故障的影响。该系统集成了矩优化求解器(MOS)和质心优化求解器(COS)两种优化策略,以最小化姿态变化并保持变形过程中的稳定性。采用前馈神经网络预测手臂变形的伺服角度,保证了手臂变形的实时性。变形机制由全局事件触发滑模控制控制,该控制将伺服运动锁定在预定义的误差阈值内。同时,采用改进的非奇异终端滑模控制器(MNTSMC)来保证系统的稳定性。仿真和实验结果表明,即使在涉及两个相邻旋翼故障的情况下,HEXmorph也能保持接近零姿态的静态悬停和机动性。通过将硬件自适应性与鲁棒控制策略相结合,HEXmorph显著提高了多旋翼航空系统的容错性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


