Gait analysis system for assessing abnormal patterns in individuals with hemiparetic stroke during robot-assisted gait training: a criterion-related validity study in healthy adults.
IF 2.8 4区 计算机科学Q3 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
{"title":"Gait analysis system for assessing abnormal patterns in individuals with hemiparetic stroke during robot-assisted gait training: a criterion-related validity study in healthy adults.","authors":"Issei Nakashima, Daisuke Imoto, Satoshi Hirano, Hitoshi Konosu, Yohei Otaka","doi":"10.3389/fnbot.2025.1558009","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Gait robots have the potential to analyze gait characteristics during gait training using mounted sensors in addition to robotic assistance of the individual's movements. However, no systems have been proposed to analyze gait performance during robot-assisted gait training. Our newly developed gait robot,\" Welwalk WW-2000 (WW-2000)\" is equipped with a gait analysis system to analyze abnormal gait patterns during robot-assisted gait training. We previously investigated the validity of the index values for the nine abnormal gait patterns. Here, we proposed new index values for four abnormal gait patterns, which are anterior trunk tilt, excessive trunk shifts over the affected side, excessive knee joint flexion, and swing difficulty; we investigated the criterion validity of the WW-2000 gait analysis system in healthy adults for these new index values.</p><p><strong>Methods: </strong>Twelve healthy participants simulated four abnormal gait patterns manifested in individuals with hemiparetic stroke while wearing the robot. Each participant was instructed to perform 16 gait trials, with four grades of severity for each of the four abnormal gait patterns. Twenty strides were recorded for each gait trial using a gait analysis system in the WW-2000 and video cameras. Abnormal gait patterns were assessed using the two parameters: the index values calculated for each stride from the WW-2000 gait analysis system, and assessor's severity scores for each stride. The correlation of the index values between the two methods was evaluated using the Spearman rank correlation coefficient for each gait pattern in each participant.</p><p><strong>Results: </strong>The median (minimum to maximum) values of Spearman rank correlation coefficient among the 12 participants between the index value calculated using the WW-2000 gait analysis system and the assessor's severity scores for anterior trunk tilt, excessive trunk shifts over the affected side, excessive knee joint flexion, and swing difficulty were 0.892 (0.749-0.969), 0.859 (0.439-0.923), 0.920 (0.738-0.969), and 0.681 (0.391-0.889), respectively.</p><p><strong>Discussion: </strong>The WW-2000 gait analysis system captured four new abnormal gait patterns observed in individuals with hemiparetic stroke with high validity, in addition to nine previously validated abnormal gait patterns. Assessing abnormal gait patterns is important as improving them contributes to stroke rehabilitation.</p><p><strong>Clinical trial registration: </strong>https://jrct.niph.go.jp, identifier jRCT 042190109.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1558009"},"PeriodicalIF":2.8000,"publicationDate":"2025-05-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12133724/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1558009","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: Gait robots have the potential to analyze gait characteristics during gait training using mounted sensors in addition to robotic assistance of the individual's movements. However, no systems have been proposed to analyze gait performance during robot-assisted gait training. Our newly developed gait robot," Welwalk WW-2000 (WW-2000)" is equipped with a gait analysis system to analyze abnormal gait patterns during robot-assisted gait training. We previously investigated the validity of the index values for the nine abnormal gait patterns. Here, we proposed new index values for four abnormal gait patterns, which are anterior trunk tilt, excessive trunk shifts over the affected side, excessive knee joint flexion, and swing difficulty; we investigated the criterion validity of the WW-2000 gait analysis system in healthy adults for these new index values.
Methods: Twelve healthy participants simulated four abnormal gait patterns manifested in individuals with hemiparetic stroke while wearing the robot. Each participant was instructed to perform 16 gait trials, with four grades of severity for each of the four abnormal gait patterns. Twenty strides were recorded for each gait trial using a gait analysis system in the WW-2000 and video cameras. Abnormal gait patterns were assessed using the two parameters: the index values calculated for each stride from the WW-2000 gait analysis system, and assessor's severity scores for each stride. The correlation of the index values between the two methods was evaluated using the Spearman rank correlation coefficient for each gait pattern in each participant.
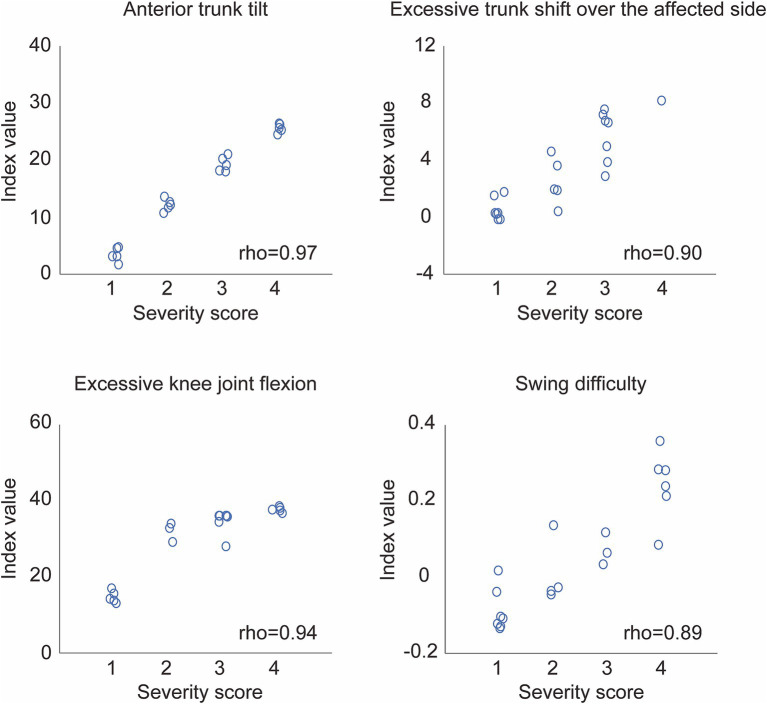
Results: The median (minimum to maximum) values of Spearman rank correlation coefficient among the 12 participants between the index value calculated using the WW-2000 gait analysis system and the assessor's severity scores for anterior trunk tilt, excessive trunk shifts over the affected side, excessive knee joint flexion, and swing difficulty were 0.892 (0.749-0.969), 0.859 (0.439-0.923), 0.920 (0.738-0.969), and 0.681 (0.391-0.889), respectively.
Discussion: The WW-2000 gait analysis system captured four new abnormal gait patterns observed in individuals with hemiparetic stroke with high validity, in addition to nine previously validated abnormal gait patterns. Assessing abnormal gait patterns is important as improving them contributes to stroke rehabilitation.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


