{"title":"Self-regulated photoresponsive heterogeneous PNIPAM hydrogel actuators†","authors":"Jingxuan Li, Jiaqi Miao and Alan C. H. Tsang","doi":"10.1039/D4NR05257A","DOIUrl":null,"url":null,"abstract":"<p >Self-regulated actuators harness material intelligence to enable complex deformations and dynamics, representing a significant advancement in automated soft robotics. However, investigations on self-regulated soft actuators, particularly those using simplified actuation modules, such as a unidirectional light beam, remain limited. Here, we present a design paradigm for self-regulated actuators based on poly(<em>N</em>-isopropylacrylamide) (PNIPAM) heterogeneous hydrogels, where self-regulated deformations are actuated using a fixed near-infrared laser. By utilizing the different responsiveness of PNIPAM hydrogels and those integrated with reduced graphene oxide (rGO), we have developed three heterogeneous hydrogel configurations: up–down, side-by-side, and hybrid types. These designs enable complex biomimetic deformations in soft hydrogel actuators, resembling a bending finger or a flexible industrial manipulator, all actuated using a single fixed-laser source. These proposed heterogeneous designs and actuation strategies leverage material intelligence to create soft actuators with enhanced autonomy, paving the way for soft automation, adaptive systems, and biomedical applications.</p>","PeriodicalId":92,"journal":{"name":"Nanoscale","volume":" 27","pages":" 16230-16238"},"PeriodicalIF":5.1000,"publicationDate":"2025-05-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nanoscale","FirstCategoryId":"88","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2025/nr/d4nr05257a","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
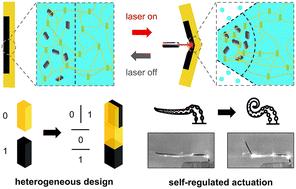
Self-regulated actuators harness material intelligence to enable complex deformations and dynamics, representing a significant advancement in automated soft robotics. However, investigations on self-regulated soft actuators, particularly those using simplified actuation modules, such as a unidirectional light beam, remain limited. Here, we present a design paradigm for self-regulated actuators based on poly(N-isopropylacrylamide) (PNIPAM) heterogeneous hydrogels, where self-regulated deformations are actuated using a fixed near-infrared laser. By utilizing the different responsiveness of PNIPAM hydrogels and those integrated with reduced graphene oxide (rGO), we have developed three heterogeneous hydrogel configurations: up–down, side-by-side, and hybrid types. These designs enable complex biomimetic deformations in soft hydrogel actuators, resembling a bending finger or a flexible industrial manipulator, all actuated using a single fixed-laser source. These proposed heterogeneous designs and actuation strategies leverage material intelligence to create soft actuators with enhanced autonomy, paving the way for soft automation, adaptive systems, and biomedical applications.
期刊介绍:
Nanoscale is a high-impact international journal, publishing high-quality research across nanoscience and nanotechnology. Nanoscale publishes a full mix of research articles on experimental and theoretical work, including reviews, communications, and full papers.Highly interdisciplinary, this journal appeals to scientists, researchers and professionals interested in nanoscience and nanotechnology, quantum materials and quantum technology, including the areas of physics, chemistry, biology, medicine, materials, energy/environment, information technology, detection science, healthcare and drug discovery, and electronics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


