Yanchun Xie, Anna Wang, Xue Zhao, Yang Jiang, Yao Wu, Hailong Yu
{"title":"Motion control and singular perturbation algorithms for lower limb rehabilitation robots.","authors":"Yanchun Xie, Anna Wang, Xue Zhao, Yang Jiang, Yao Wu, Hailong Yu","doi":"10.3389/fnbot.2025.1562519","DOIUrl":null,"url":null,"abstract":"<p><p>To better assist patients with lower limb injuries in their rehabilitation training, this paper focuses on motion control and singular perturbation algorithms and their practical applications. First, the paper conducts an in-depth analysis of the mechanical structure of such robots and establishes detailed kinematics and dynamics models. An optimal S-type planning algorithm is proposed, transforming the S-type planning into an iterative solution problem for efficient and accelerated trajectory planning using dynamic equations. This algorithm comprehensively considers joint range of motion, speed constraints, and dynamic conditions, ensuring the smoothness and continuity of motion trajectories. Second, a zero-force control method is introduced, incorporating friction terms into the traditional dynamic equations and utilizing the LuGre friction model for friction analysis to achieve zero-force control. Furthermore, to address the multi-scale dynamic system characteristics present in rehabilitation training, a control method based on singular perturbation theory is proposed. This method enhances the system's robustness and adaptability by simplifying the system model and optimizing controller design, enabling it to better accommodate complex motion requirements during rehabilitation. Finally, experiments verify the correctness of the kinematics and optimal S-type trajectory planning. In lower limb rehabilitation robots, zero-force control can better assist patients in rehabilitation training for lower limb injuries, while the singular perturbation method improves the accuracy, response speed, and robustness of the control system, allowing it to adapt to individual rehabilitation needs and complex motion patterns. The novelty of this paper lies in the integration of the singular perturbation method with the LuGre friction model, significantly enhancing the precision of joint dynamic control, and improving controller design through the introduction of a torque deviation feedback mechanism, thereby increasing system stability and response speed. Experimental results demonstrate significant improvements in tracking error and system response compared to traditional methods, providing patients with a more comfortable and safer rehabilitation experience.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1562519"},"PeriodicalIF":2.8000,"publicationDate":"2025-05-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12098330/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1562519","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
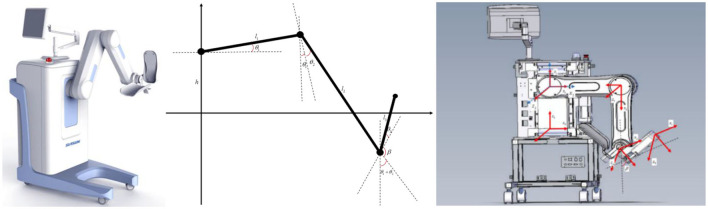
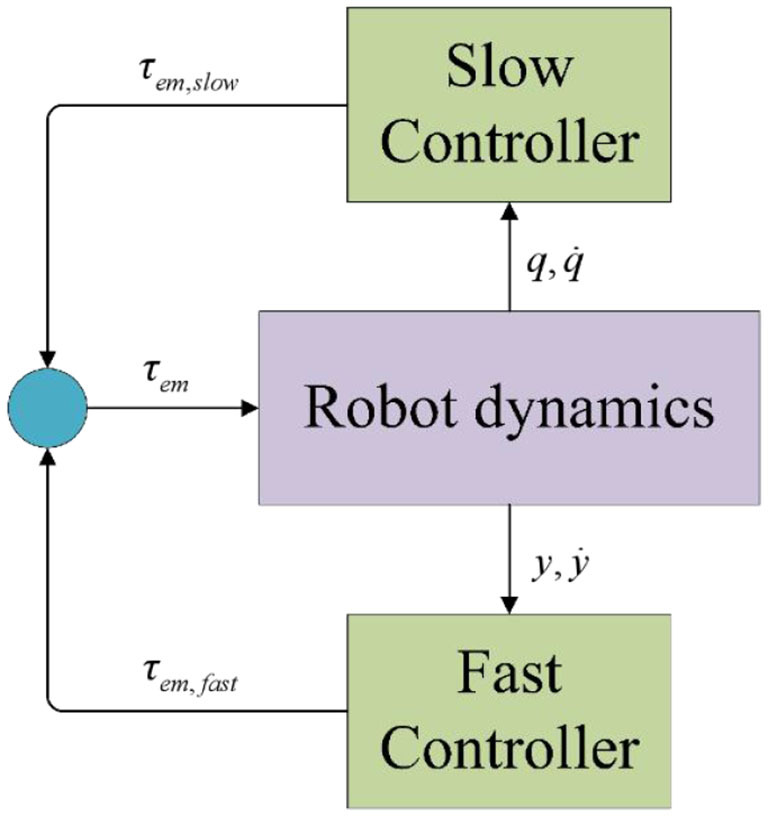
To better assist patients with lower limb injuries in their rehabilitation training, this paper focuses on motion control and singular perturbation algorithms and their practical applications. First, the paper conducts an in-depth analysis of the mechanical structure of such robots and establishes detailed kinematics and dynamics models. An optimal S-type planning algorithm is proposed, transforming the S-type planning into an iterative solution problem for efficient and accelerated trajectory planning using dynamic equations. This algorithm comprehensively considers joint range of motion, speed constraints, and dynamic conditions, ensuring the smoothness and continuity of motion trajectories. Second, a zero-force control method is introduced, incorporating friction terms into the traditional dynamic equations and utilizing the LuGre friction model for friction analysis to achieve zero-force control. Furthermore, to address the multi-scale dynamic system characteristics present in rehabilitation training, a control method based on singular perturbation theory is proposed. This method enhances the system's robustness and adaptability by simplifying the system model and optimizing controller design, enabling it to better accommodate complex motion requirements during rehabilitation. Finally, experiments verify the correctness of the kinematics and optimal S-type trajectory planning. In lower limb rehabilitation robots, zero-force control can better assist patients in rehabilitation training for lower limb injuries, while the singular perturbation method improves the accuracy, response speed, and robustness of the control system, allowing it to adapt to individual rehabilitation needs and complex motion patterns. The novelty of this paper lies in the integration of the singular perturbation method with the LuGre friction model, significantly enhancing the precision of joint dynamic control, and improving controller design through the introduction of a torque deviation feedback mechanism, thereby increasing system stability and response speed. Experimental results demonstrate significant improvements in tracking error and system response compared to traditional methods, providing patients with a more comfortable and safer rehabilitation experience.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


