The Role of Robot-Assisted Technique in Treating Adult Degenerative Scoliosis with Circumferential Minimal Invasive Correction Surgery - A Retrospective Analysis of 51 Consecutive Cases.
{"title":"The Role of Robot-Assisted Technique in Treating Adult Degenerative Scoliosis with Circumferential Minimal Invasive Correction Surgery - A Retrospective Analysis of 51 Consecutive Cases.","authors":"Qiang Zhang, Zhe Chen, Yazhou Lin, Xingkai Zhang, Wenjian Wu, Yu Liang","doi":"10.2147/ORR.S514237","DOIUrl":null,"url":null,"abstract":"<p><strong>Study design: </strong>Retrospective chart review.</p><p><strong>Objective: </strong>This study aims to investigate the application of robots in treating adult degenerative scoliosis (ADS) with circumferential minimal invasive surgery (cMIS).</p><p><strong>Background: </strong>The cMIS is useful but faces a lot of challenges in correcting ADS. One of the most important challenges is the difficulty in screw placement. Robot-assisted technique demonstrates lots of advantages but the data about its application in treating ADS is limited in literatures.</p><p><strong>Methods: </strong>A total of 51 cases diagnosed with ADS were retrospectively analyzed. All patients underwent cMIS technique with staged surgeries (OLIF and PPS fixation). Group A enrolled 21 patients and performed robot-assisted technique. Group B enrolled 30 patients and performed fluoroscopy guided technique. Clinical outcomes like the operation time, radiation exposure, pressure curve and post-operation VAS score were recorded. 3D-CT scan was also performed to evaluate the accuracy of the screws.</p><p><strong>Results: </strong>The average preparation time were much higher in group A (23.4 ± 2.8 vs 3.1 ± 1.0 min, p < 0.0001). But the total operation time was similar (62.7 ± 12.5 vs 55.7 ± 20.6 min, p = 0.174). The average fluoroscopic scan number were 9.4 ± 1.7 in group A, much lower than that of group A (27.7 ±5.9, p < 0.001). No statistical difference was found with the VAS scale between the groups (p = 0.631). No matter considers only screws of grade A as perfect screws (81.5% vs 73.8%) or considers both grade A and B as acceptable screws (93.8% vs 87.7%), group A demonstrated significant higher screw accuracy (p = 0.038, p = 0.018, respectively). Also, the robots demonstrated significant less facet joint violence (p < 0.0001), larger inward tilt angle (p < 0.0001), and longer screw length (p = 0.0008).</p><p><strong>Conclusion: </strong>The robot-assisted technique demonstrated significant advantages like higher pedicle screw accuracy, better trajectory, less radiation exposure, but similar operation time compared with fluoroscopy guided technique in treating ADS with CMIS.</p>","PeriodicalId":19608,"journal":{"name":"Orthopedic Research and Reviews","volume":"17 ","pages":"189-198"},"PeriodicalIF":2.3000,"publicationDate":"2025-05-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12067674/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Orthopedic Research and Reviews","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.2147/ORR.S514237","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
引用次数: 0
Abstract
Study design: Retrospective chart review.
Objective: This study aims to investigate the application of robots in treating adult degenerative scoliosis (ADS) with circumferential minimal invasive surgery (cMIS).
Background: The cMIS is useful but faces a lot of challenges in correcting ADS. One of the most important challenges is the difficulty in screw placement. Robot-assisted technique demonstrates lots of advantages but the data about its application in treating ADS is limited in literatures.
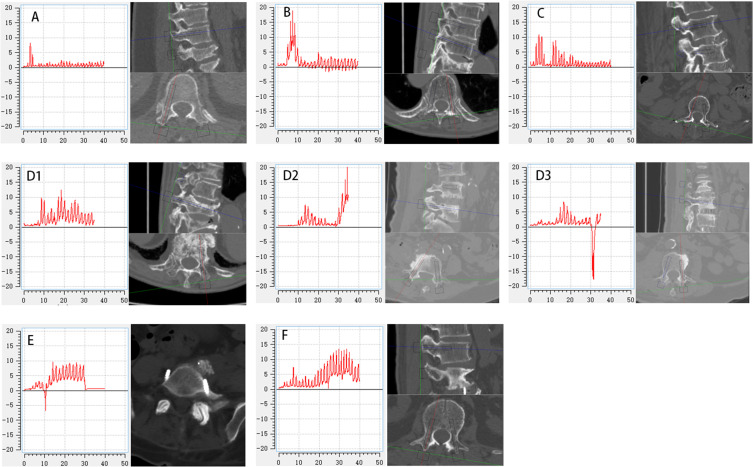
Methods: A total of 51 cases diagnosed with ADS were retrospectively analyzed. All patients underwent cMIS technique with staged surgeries (OLIF and PPS fixation). Group A enrolled 21 patients and performed robot-assisted technique. Group B enrolled 30 patients and performed fluoroscopy guided technique. Clinical outcomes like the operation time, radiation exposure, pressure curve and post-operation VAS score were recorded. 3D-CT scan was also performed to evaluate the accuracy of the screws.
Results: The average preparation time were much higher in group A (23.4 ± 2.8 vs 3.1 ± 1.0 min, p < 0.0001). But the total operation time was similar (62.7 ± 12.5 vs 55.7 ± 20.6 min, p = 0.174). The average fluoroscopic scan number were 9.4 ± 1.7 in group A, much lower than that of group A (27.7 ±5.9, p < 0.001). No statistical difference was found with the VAS scale between the groups (p = 0.631). No matter considers only screws of grade A as perfect screws (81.5% vs 73.8%) or considers both grade A and B as acceptable screws (93.8% vs 87.7%), group A demonstrated significant higher screw accuracy (p = 0.038, p = 0.018, respectively). Also, the robots demonstrated significant less facet joint violence (p < 0.0001), larger inward tilt angle (p < 0.0001), and longer screw length (p = 0.0008).
Conclusion: The robot-assisted technique demonstrated significant advantages like higher pedicle screw accuracy, better trajectory, less radiation exposure, but similar operation time compared with fluoroscopy guided technique in treating ADS with CMIS.
研究设计:回顾性图表回顾。目的:探讨机器人在环周微创手术(cMIS)治疗成人退行性脊柱侧凸(ADS)中的应用。背景:cMIS是有用的,但在纠正ADS时面临很多挑战,其中最重要的挑战之一是螺钉放置困难。机器人辅助技术显示出许多优点,但其在治疗ADS中的应用数据在文献中有限。方法:对51例诊断为ADS的患者进行回顾性分析。所有患者均行cMIS分阶段手术(OLIF和PPS固定)。A组入组21例患者,采用机器人辅助技术。B组30例患者行透视引导技术。记录手术时间、放疗量、压力曲线及术后VAS评分等临床结果。同时进行3D-CT扫描以评估螺钉的准确性。结果:A组的平均制备时间明显高于对照组(23.4±2.8 vs 3.1±1.0 min, p < 0.0001)。但总手术时间相似(62.7±12.5 min vs 55.7±20.6 min, p = 0.174)。A组平均扫描次数为9.4±1.7次,明显低于A组(27.7±5.9次,p < 0.001)。两组间VAS评分差异无统计学意义(p = 0.631)。无论仅将A级螺钉视为完美螺钉(81.5% vs 73.8%)还是将A级和B级螺钉均视为可接受螺钉(93.8% vs 87.7%), A组的螺钉精度均显著高于A组(p = 0.038, p = 0.018)。此外,机器人表现出更少的关节突关节暴力(p < 0.0001),更大的向内倾斜角度(p < 0.0001)和更长的螺钉长度(p = 0.0008)。结论:与透视引导技术相比,机器人辅助技术治疗ADS具有椎弓根螺钉精度高、轨迹好、辐射暴露少、手术时间短等显著优势。
期刊介绍:
Orthopedic Research and Reviews is an international, peer-reviewed, open-access journal focusing on the patho-physiology of the musculoskeletal system, trauma, surgery and other corrective interventions to restore mobility and function. Advances in new technologies, materials, techniques and pharmacological agents will be particularly welcome. Specific topics covered in the journal include: Patho-physiology and bioengineering, Technologies and materials science, Surgical techniques, including robotics, Trauma management and care, Treatment including pharmacological and non-pharmacological, Rehabilitation and Multidisciplinarian care approaches, Patient quality of life, satisfaction and preference, Health economic evaluations. The journal welcomes submitted papers covering original research, basic science and technology, clinical studies, reviews and evaluations, guidelines, expert opinion and commentary, case reports and extended reports.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


