{"title":"HR-NeRF: advancing realism and accuracy in highlight scene representation.","authors":"Shufan Dai, Shanqin Wang","doi":"10.3389/fnbot.2025.1558948","DOIUrl":null,"url":null,"abstract":"<p><p>NeRF and its variants excel in novel view synthesis but struggle with scenes featuring specular highlights. To address this limitation, we introduce the Highlight Recovery Network (HRNet), a new architecture that enhances NeRF's ability to capture specular scenes. HRNet incorporates Swish activation functions, affine transformations, multilayer perceptrons (MLPs), and residual blocks, which collectively enable smooth non-linear transformations, adaptive feature scaling, and hierarchical feature extraction. The residual connections help mitigate the vanishing gradient problem, ensuring stable training. Despite the simplicity of HRNet's components, it achieves impressive results in recovering specular highlights. Additionally, a density voxel grid enhances model efficiency. Evaluations on four inward-facing benchmarks demonstrate that our approach outperforms NeRF and its variants, achieving a 3-5 dB PSNR improvement on each dataset while accurately capturing scene details. Furthermore, our method effectively preserves image details without requiring positional encoding, rendering a single scene in ~18 min on an NVIDIA RTX 3090 Ti GPU.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1558948"},"PeriodicalIF":2.8000,"publicationDate":"2025-04-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12041011/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1558948","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
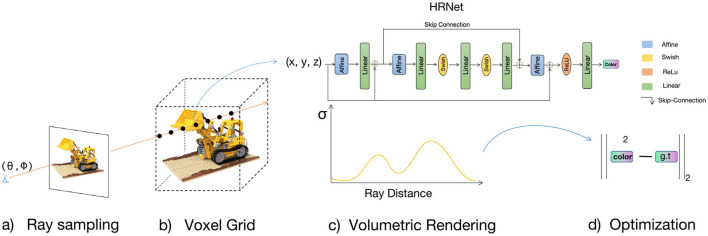
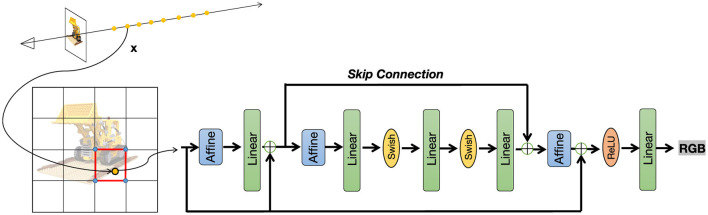
NeRF and its variants excel in novel view synthesis but struggle with scenes featuring specular highlights. To address this limitation, we introduce the Highlight Recovery Network (HRNet), a new architecture that enhances NeRF's ability to capture specular scenes. HRNet incorporates Swish activation functions, affine transformations, multilayer perceptrons (MLPs), and residual blocks, which collectively enable smooth non-linear transformations, adaptive feature scaling, and hierarchical feature extraction. The residual connections help mitigate the vanishing gradient problem, ensuring stable training. Despite the simplicity of HRNet's components, it achieves impressive results in recovering specular highlights. Additionally, a density voxel grid enhances model efficiency. Evaluations on four inward-facing benchmarks demonstrate that our approach outperforms NeRF and its variants, achieving a 3-5 dB PSNR improvement on each dataset while accurately capturing scene details. Furthermore, our method effectively preserves image details without requiring positional encoding, rendering a single scene in ~18 min on an NVIDIA RTX 3090 Ti GPU.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


