{"title":"Forecasting motion trajectories of elbow and knee joints during infant crawling based on long-short-term memory (LSTM) networks.","authors":"Jieyi Mo, Qiliang Xiong, Ying Chen, Yuan Liu, Xiaoying Wu, Nong Xiao, Wensheng Hou","doi":"10.1186/s12938-025-01360-1","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Hands-and-knees crawling is a promising rehabilitation intervention for infants with motor impairments, while research on assistive crawling devices for rehabilitation training was still in its early stages. In particular, precisely generating motion trajectories is a prerequisite to controlling exoskeleton assistive devices, and deep learning-based prediction algorithms, such as Long-Short-Term Memory (LSTM) networks, have proven effective in forecasting joint trajectories of gait. Despite this, no previous studies have focused on forecasting the more variable and complex trajectories of infant crawling. Therefore, this paper aims to explore the feasibility of using LSTM networks to predict crawling trajectories, thereby advancing our understanding of how to actively control crawling rehabilitation training robots.</p><p><strong>Methods: </strong>We collected joint trajectory data from 20 healthy infants (11 males and 9 females, aged 8-15 months) as they crawled on hands and knees. This study implemented LSTM networks to forecast bilateral elbow and knee trajectories based on corresponding joint angles. The data set comprised 58, 782 time steps, each containing 4 joint angles. We partitioned the data set into 70% for training and 30% for testing to evaluate predictive performance. We investigated a total of 24 combinations of input and output time-frames, with window sizes for input vectors ranging from 10, 15, 20, 30, 40, 50, 70, and 100 time steps, and output vectors from 5, 10, and 15 steps. Evaluation metrics included Mean Absolute Error (MAE), Mean Squared Error (MSE), and Correlation Coefficient (CC) to assess prediction accuracy.</p><p><strong>Results: </strong>The results indicate that across various input-output windows, the MAE for elbow joints ranged from 0.280 to 4.976°, MSE ranged from 0.203° to 59.186°, and CC ranged from 89.977% to 99.959%. For knee joints, MAE ranged from 0.277 to 4.262°, MSE from 0.229 to 53.272°, and CC from 89.454% to 99.944%. Results also show that smaller output window sizes lead to lower prediction errors. As expected, the LSTM predicting 5 output time steps has the lowest average error, while the LSTM predicting 15 time steps has the highest average error. In addition, variations in input window size had a minimal impact on average error when the output window size was fixed. Overall, the optimal performance for both elbow and knee joints was observed with input-output window sizes of 30 and 5 time steps, respectively, yielding an MAE of 0.295°, MSE of 0.260°, and CC of 99.938%.</p><p><strong>Conclusions: </strong>This study demonstrates the feasibility of forecasting infant crawling trajectories using LSTM networks, which could potentially integrate with exoskeleton control systems. It experimentally explores how different input and output time-frames affect prediction accuracy and sets the stage for future research focused on optimizing models and developing effective control strategies to improve assistive crawling devices.</p>","PeriodicalId":8927,"journal":{"name":"BioMedical Engineering OnLine","volume":"24 1","pages":"39"},"PeriodicalIF":2.9000,"publicationDate":"2025-04-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11967147/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"BioMedical Engineering OnLine","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s12938-025-01360-1","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Background: Hands-and-knees crawling is a promising rehabilitation intervention for infants with motor impairments, while research on assistive crawling devices for rehabilitation training was still in its early stages. In particular, precisely generating motion trajectories is a prerequisite to controlling exoskeleton assistive devices, and deep learning-based prediction algorithms, such as Long-Short-Term Memory (LSTM) networks, have proven effective in forecasting joint trajectories of gait. Despite this, no previous studies have focused on forecasting the more variable and complex trajectories of infant crawling. Therefore, this paper aims to explore the feasibility of using LSTM networks to predict crawling trajectories, thereby advancing our understanding of how to actively control crawling rehabilitation training robots.
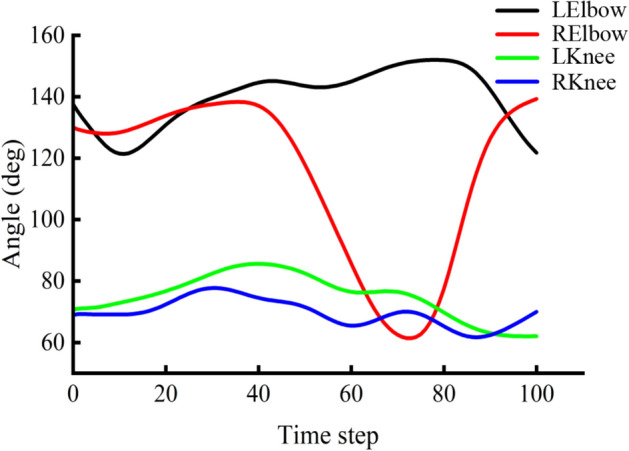
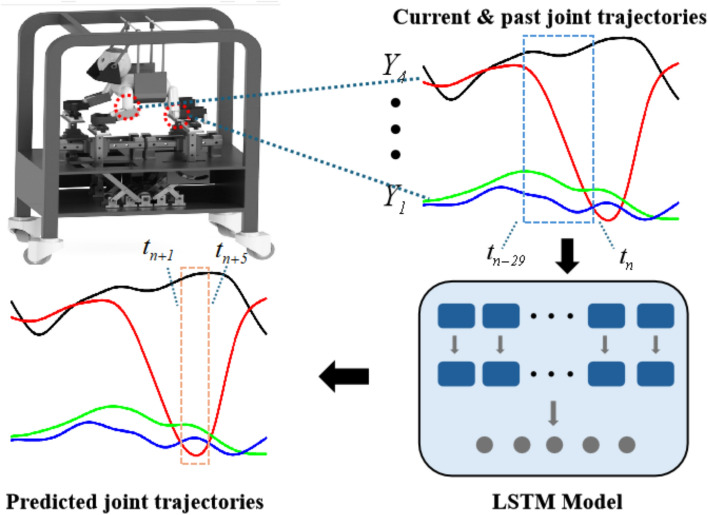
Methods: We collected joint trajectory data from 20 healthy infants (11 males and 9 females, aged 8-15 months) as they crawled on hands and knees. This study implemented LSTM networks to forecast bilateral elbow and knee trajectories based on corresponding joint angles. The data set comprised 58, 782 time steps, each containing 4 joint angles. We partitioned the data set into 70% for training and 30% for testing to evaluate predictive performance. We investigated a total of 24 combinations of input and output time-frames, with window sizes for input vectors ranging from 10, 15, 20, 30, 40, 50, 70, and 100 time steps, and output vectors from 5, 10, and 15 steps. Evaluation metrics included Mean Absolute Error (MAE), Mean Squared Error (MSE), and Correlation Coefficient (CC) to assess prediction accuracy.
Results: The results indicate that across various input-output windows, the MAE for elbow joints ranged from 0.280 to 4.976°, MSE ranged from 0.203° to 59.186°, and CC ranged from 89.977% to 99.959%. For knee joints, MAE ranged from 0.277 to 4.262°, MSE from 0.229 to 53.272°, and CC from 89.454% to 99.944%. Results also show that smaller output window sizes lead to lower prediction errors. As expected, the LSTM predicting 5 output time steps has the lowest average error, while the LSTM predicting 15 time steps has the highest average error. In addition, variations in input window size had a minimal impact on average error when the output window size was fixed. Overall, the optimal performance for both elbow and knee joints was observed with input-output window sizes of 30 and 5 time steps, respectively, yielding an MAE of 0.295°, MSE of 0.260°, and CC of 99.938%.
Conclusions: This study demonstrates the feasibility of forecasting infant crawling trajectories using LSTM networks, which could potentially integrate with exoskeleton control systems. It experimentally explores how different input and output time-frames affect prediction accuracy and sets the stage for future research focused on optimizing models and developing effective control strategies to improve assistive crawling devices.
期刊介绍:
BioMedical Engineering OnLine is an open access, peer-reviewed journal that is dedicated to publishing research in all areas of biomedical engineering.
BioMedical Engineering OnLine is aimed at readers and authors throughout the world, with an interest in using tools of the physical and data sciences and techniques in engineering to understand and solve problems in the biological and medical sciences. Topical areas include, but are not limited to:
Bioinformatics-
Bioinstrumentation-
Biomechanics-
Biomedical Devices & Instrumentation-
Biomedical Signal Processing-
Healthcare Information Systems-
Human Dynamics-
Neural Engineering-
Rehabilitation Engineering-
Biomaterials-
Biomedical Imaging & Image Processing-
BioMEMS and On-Chip Devices-
Bio-Micro/Nano Technologies-
Biomolecular Engineering-
Biosensors-
Cardiovascular Systems Engineering-
Cellular Engineering-
Clinical Engineering-
Computational Biology-
Drug Delivery Technologies-
Modeling Methodologies-
Nanomaterials and Nanotechnology in Biomedicine-
Respiratory Systems Engineering-
Robotics in Medicine-
Systems and Synthetic Biology-
Systems Biology-
Telemedicine/Smartphone Applications in Medicine-
Therapeutic Systems, Devices and Technologies-
Tissue Engineering

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


