Sen Zhang, Fusheng Zha, Xiangji Wang, Mantian Li, Wei Guo, Pengfei Wang, Xiaolin Li, Lining Sun
{"title":"High-efficiency sparse convolution operator for event-based cameras.","authors":"Sen Zhang, Fusheng Zha, Xiangji Wang, Mantian Li, Wei Guo, Pengfei Wang, Xiaolin Li, Lining Sun","doi":"10.3389/fnbot.2025.1537673","DOIUrl":null,"url":null,"abstract":"<p><p>Event-based cameras are bio-inspired vision sensors that mimic the sparse and asynchronous activation of the animal retina, offering advantages such as low latency and low computational load in various robotic applications. However, despite their inherent sparsity, most existing visual processing algorithms are optimized for conventional standard cameras and dense images captured from them, resulting in computational redundancy and high latency when applied to event-based cameras. To address this gap, we propose a sparse convolution operator tailored for event-based cameras. By selectively skipping invalid sub-convolutions and efficiently reorganizing valid computations, our operator reduces computational workload by nearly 90% and achieves almost 2× acceleration in processing speed, while maintaining the same accuracy as dense convolution operators. This innovation unlocks the potential of event-based cameras in applications such as autonomous navigation, real-time object tracking, and industrial inspection, enabling low-latency and high-efficiency perception in resource-constrained robotic systems.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1537673"},"PeriodicalIF":2.8000,"publicationDate":"2025-03-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11936924/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1537673","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
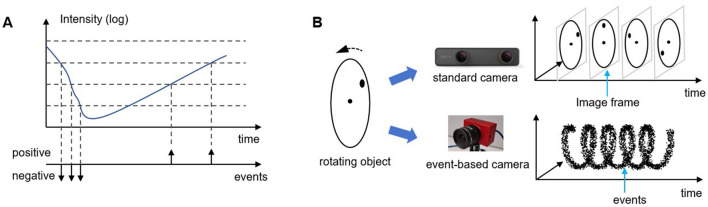
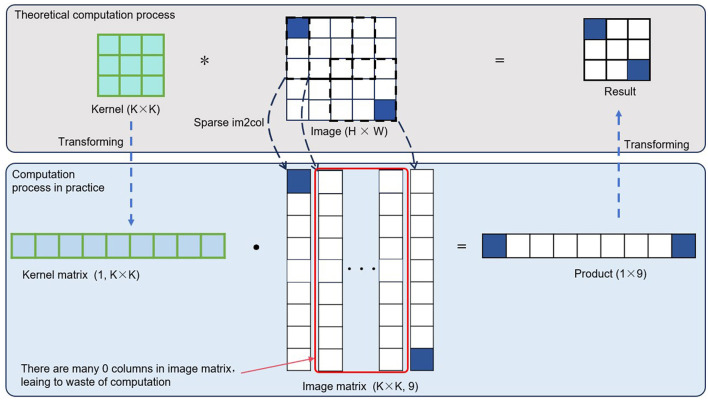
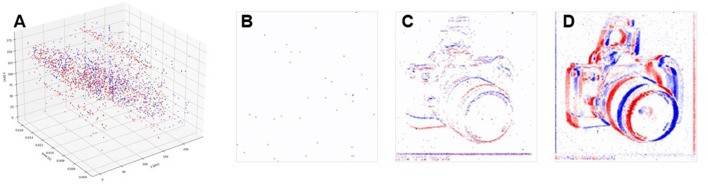
Event-based cameras are bio-inspired vision sensors that mimic the sparse and asynchronous activation of the animal retina, offering advantages such as low latency and low computational load in various robotic applications. However, despite their inherent sparsity, most existing visual processing algorithms are optimized for conventional standard cameras and dense images captured from them, resulting in computational redundancy and high latency when applied to event-based cameras. To address this gap, we propose a sparse convolution operator tailored for event-based cameras. By selectively skipping invalid sub-convolutions and efficiently reorganizing valid computations, our operator reduces computational workload by nearly 90% and achieves almost 2× acceleration in processing speed, while maintaining the same accuracy as dense convolution operators. This innovation unlocks the potential of event-based cameras in applications such as autonomous navigation, real-time object tracking, and industrial inspection, enabling low-latency and high-efficiency perception in resource-constrained robotic systems.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


