{"title":"Performance of ambiguity-resolved detector for GNSS mixed-integer model.","authors":"Chengyu Yin, P J G Teunissen, C C J M Tiberius","doi":"10.1007/s10291-024-01806-4","DOIUrl":null,"url":null,"abstract":"<p><p>Teunissen (J Geod 98(83):1-16, 2024) proposed the ambiguity-resolved (AR) detection theory for GNSS mixed-integer model validation. In this contribution, we study the performance of the AR detector through analysis and simulation experiments and compare it with the ambiguity-float (AF) and ambiguity-known (AK) detectors. We describe how the detectors can be implemented and how to evaluate their performance by computing the power as functions of the model misspecifications' size. We present two simulation experiments with single- and dual-frequency GPS models and demonstrate that the AR detector can provide a larger detection power than the AF detector, even if the success rate is not close to one. Then, we obtain power functions over 25 user locations with five observation models and 72 satellite geometries per location per model. We find that the AR detector increases the detection probability of ionosphere and troposphere delays by 47% and 60% on average when the success rate is larger than 97.5% and the level of significance is 0.01. We also find the AR detection power to be larger than that of the AF detector in case of multi-dimensional misspecifications.</p>","PeriodicalId":12788,"journal":{"name":"GPS Solutions","volume":"29 2","pages":"76"},"PeriodicalIF":3.9000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11890412/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"GPS Solutions","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s10291-024-01806-4","RegionNum":1,"RegionCategory":"地球科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/3/8 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"REMOTE SENSING","Score":null,"Total":0}
引用次数: 0
Abstract
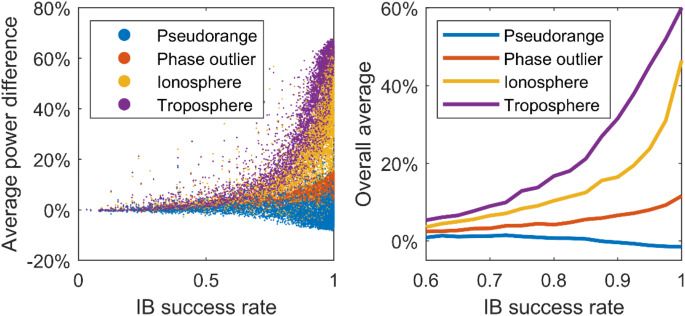
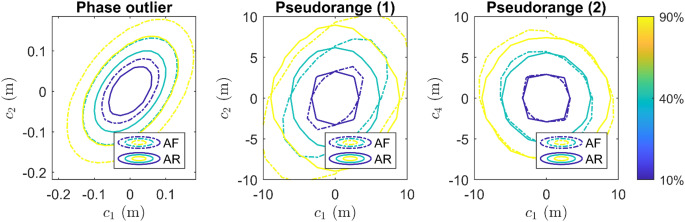
Teunissen (J Geod 98(83):1-16, 2024) proposed the ambiguity-resolved (AR) detection theory for GNSS mixed-integer model validation. In this contribution, we study the performance of the AR detector through analysis and simulation experiments and compare it with the ambiguity-float (AF) and ambiguity-known (AK) detectors. We describe how the detectors can be implemented and how to evaluate their performance by computing the power as functions of the model misspecifications' size. We present two simulation experiments with single- and dual-frequency GPS models and demonstrate that the AR detector can provide a larger detection power than the AF detector, even if the success rate is not close to one. Then, we obtain power functions over 25 user locations with five observation models and 72 satellite geometries per location per model. We find that the AR detector increases the detection probability of ionosphere and troposphere delays by 47% and 60% on average when the success rate is larger than 97.5% and the level of significance is 0.01. We also find the AR detection power to be larger than that of the AF detector in case of multi-dimensional misspecifications.
期刊介绍:
GPS Solutions is a scientific journal. It is published quarterly and features system design issues and a full range of current and emerging applications of global navigation satellite systems (GNSS) such as GPS, GLONASS, Galileo, BeiDou, local systems, and augmentations. Novel, innovative, or highly demanding uses are of prime interest. Areas of application include: aviation, surveying and mapping, forestry and agriculture, maritime and waterway navigation, public transportation, time and frequency comparisons and dissemination, space and satellite operations, law enforcement and public safety, communications, meteorology and atmospheric science, geosciences, monitoring global change, technology and engineering, GIS, geodesy, and others.
GPS Solutions addresses the latest developments in GNSS infrastructure, mathematical modeling, algorithmic developments and data analysis, user hardware, and general issues that impact the user community. Contributions from the entire spectrum of GNSS professionals are represented, including university researchers, scientists from government laboratories, receiver industry and other commercial developers, public officials, and business leaders.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


