Soft Pressure Sensor Array Inspired by Human Skin for Detecting 3D Robotic Movement
IF 8.2
2区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
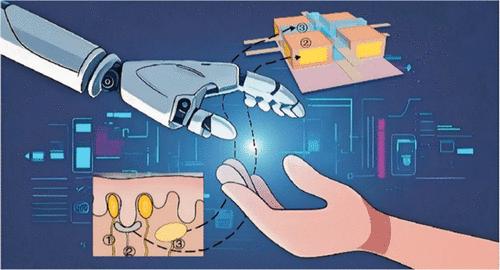
3D soft pressure sensors play an important role in precise robotic operations. Multimodal soft pressure sensors that detect both static and dynamic pressure allow robots to respond accurately and in real time. Here, we present a sensor array with a size of 1.5 cm × 1.5 cm composed of capacitive and piezoelectric units, inspired by Merkel cells and Vater–Pacini corpuscles of human skin. The tangential force from 0.1 to 2 N at angles of 0°, 45°, 180°, and 225° can be resolved by analyzing the signals of the 16 piezoelectric sensors. The 4 capacitive sensors exhibit consistent and stable performance when sensing normal forces from 0.5 to 4 N. The weight and size of objects, as well as the direction of grasping, effectively distinguish the weight, size, and grasping direction of objects when integrated on a robotic gripper. Running and walking movements are recognized when attached to a robot’s knee.
受人体皮肤启发设计的软压力传感器阵列,用于检测三维机器人运动
三维软压力传感器在机器人精密操作中发挥着重要作用。多模态软压力传感器可以检测静态和动态压力,使机器人能够准确实时地做出反应。在这里,我们提出了一个尺寸为1.5 cm × 1.5 cm的传感器阵列,由电容和压电单元组成,灵感来自于人类皮肤的默克尔细胞和瓦特-帕西尼小体。通过分析16个压电传感器的信号,可以分辨出0°、45°、180°和225°角度下0.1 ~ 2n的切向力。4个电容式传感器在感知0.5 ~ 4n的法向力时表现出一致稳定的性能,物体的重量、尺寸以及抓取方向,集成在机器人抓取器上可以有效区分物体的重量、尺寸和抓取方向。在机器人的膝盖上安装了跑步和走路的动作,就能识别出来。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

ACS Applied Materials & Interfaces
工程技术-材料科学:综合
CiteScore
16.00
自引率
6.30%
发文量
4978
审稿时长
1.8 months
期刊介绍:
ACS Applied Materials & Interfaces is a leading interdisciplinary journal that brings together chemists, engineers, physicists, and biologists to explore the development and utilization of newly-discovered materials and interfacial processes for specific applications. Our journal has experienced remarkable growth since its establishment in 2009, both in terms of the number of articles published and the impact of the research showcased. We are proud to foster a truly global community, with the majority of published articles originating from outside the United States, reflecting the rapid growth of applied research worldwide.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


