Nitish Satya Sai Gedela, Ryan D Radawiec, Sachin Salim, Julianna Richie, Cynthia Chestek, Anne Draelos, Galit Pelled
{"title":"In vivo electrophysiology recordings and computational modeling can predict octopus arm movement.","authors":"Nitish Satya Sai Gedela, Ryan D Radawiec, Sachin Salim, Julianna Richie, Cynthia Chestek, Anne Draelos, Galit Pelled","doi":"10.1186/s42234-025-00166-9","DOIUrl":null,"url":null,"abstract":"<p><p>The octopus has many features that make it advantageous for revealing principles of motor circuits and control and predicting behavior. Here, an array of carbon electrodes providing single-unit electrophysiology recordings were implanted into the octopus anterior nerve cord. The number of spikes and arm movements in response to stimulation at different locations along the arm were recorded. We observed that the number of spikes occurring within the first 100 ms after stimulation were predictive of the resultant movement response. Machine learning models showed that temporal electrophysiological features could be used to predict whether an arm movement occurred with 88.64% confidence, and if it was a lateral arm movement or a grasping motion with 75.45% confidence. Both supervised and unsupervised methods were applied to gain streaming measurements of octopus arm movements and how their motor circuitry produces rich movement types in real time. For kinematic analysis, deep learning models and unsupervised dimensionality reduction identified a consistent set of features that could be used to distinguish different types of arm movements. The neural circuits and the computational models identified here generated predictions for how to evoke a particular, complex movement in an orchestrated sequence for an individual motor circuit. This study demonstrates how real-time motor behaviors can be predicted and distinguished, contributing to the development of brain-machine interfaces. The ability to accurately model and predict complex movement patterns has broad implications for advancing technologies in robotics, neuroprosthetics, and artificial intelligence, paving the way for more sophisticated and adaptable systems.</p>","PeriodicalId":72363,"journal":{"name":"Bioelectronic medicine","volume":"11 1","pages":"4"},"PeriodicalIF":0.0000,"publicationDate":"2025-02-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11827351/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Bioelectronic medicine","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s42234-025-00166-9","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
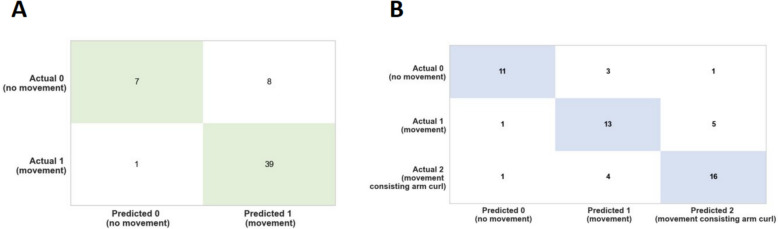
The octopus has many features that make it advantageous for revealing principles of motor circuits and control and predicting behavior. Here, an array of carbon electrodes providing single-unit electrophysiology recordings were implanted into the octopus anterior nerve cord. The number of spikes and arm movements in response to stimulation at different locations along the arm were recorded. We observed that the number of spikes occurring within the first 100 ms after stimulation were predictive of the resultant movement response. Machine learning models showed that temporal electrophysiological features could be used to predict whether an arm movement occurred with 88.64% confidence, and if it was a lateral arm movement or a grasping motion with 75.45% confidence. Both supervised and unsupervised methods were applied to gain streaming measurements of octopus arm movements and how their motor circuitry produces rich movement types in real time. For kinematic analysis, deep learning models and unsupervised dimensionality reduction identified a consistent set of features that could be used to distinguish different types of arm movements. The neural circuits and the computational models identified here generated predictions for how to evoke a particular, complex movement in an orchestrated sequence for an individual motor circuit. This study demonstrates how real-time motor behaviors can be predicted and distinguished, contributing to the development of brain-machine interfaces. The ability to accurately model and predict complex movement patterns has broad implications for advancing technologies in robotics, neuroprosthetics, and artificial intelligence, paving the way for more sophisticated and adaptable systems.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


