Xiangqian Shi, Chengyu Yang, Pak Chung Lee, Disheng Xie, Zhongping Ye, Zheng Li, Raymond Kai-Yu Tong
{"title":"An interactive soft robotic hand-task training system with wireless task boards and daily objects on post-stroke rehabilitation.","authors":"Xiangqian Shi, Chengyu Yang, Pak Chung Lee, Disheng Xie, Zhongping Ye, Zheng Li, Raymond Kai-Yu Tong","doi":"10.1017/wtc.2024.10","DOIUrl":null,"url":null,"abstract":"<p><p>We have developed an interactive system comprising a soft wearable robot hand and a wireless task board, facilitating the interaction between the hand and regular daily objects for task-oriented training in stroke rehabilitation. A ring-reinforced soft actuator (RSA) to accommodate different hand sizes and enable flexion and extension movements was introduced in this paper. Individually controlled finger actuators assist stroke patients during various grasping tasks. A wireless task board was developed to support the training, allowing for the placement of training objects and seamless interaction with the soft robotic hand. Evaluation with seven stroke subjects shows significant improvements in upper limb functions (FMA), hand-motor abilities (ARAT, BBT), and maximum grip strengths after 20 sessions of this task-oriented training. These improvements were observed to persist for at least 3 months post-training. The results demonstrate its potential to enhance stroke rehabilitation and promote hand-motor recovery. This lightweight, user-friendly interactive system facilitates frequent hand practice and easily integrates into regular rehabilitation therapy routines.</p>","PeriodicalId":75318,"journal":{"name":"Wearable technologies","volume":"6 ","pages":"e4"},"PeriodicalIF":2.8000,"publicationDate":"2025-02-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11810511/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Wearable technologies","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1017/wtc.2024.10","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
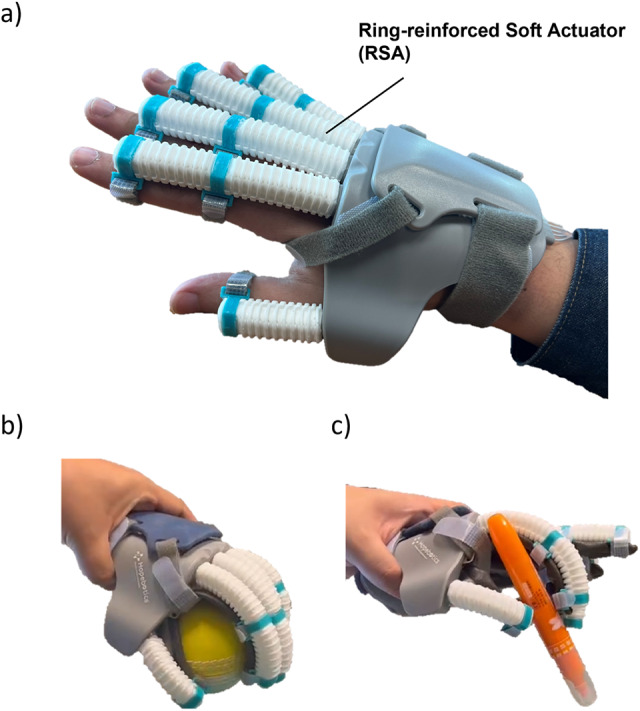
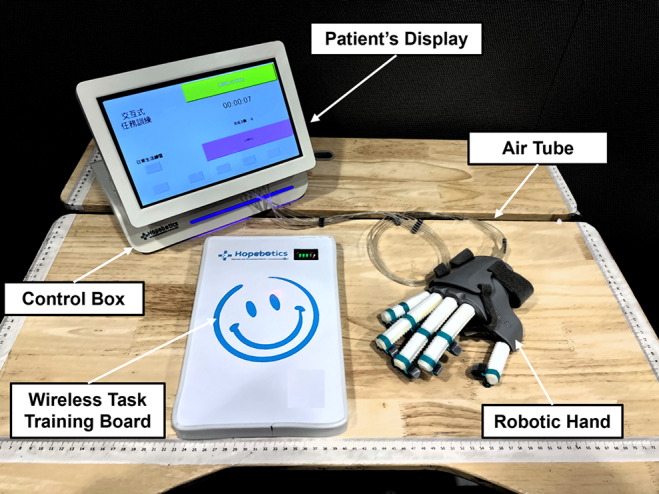
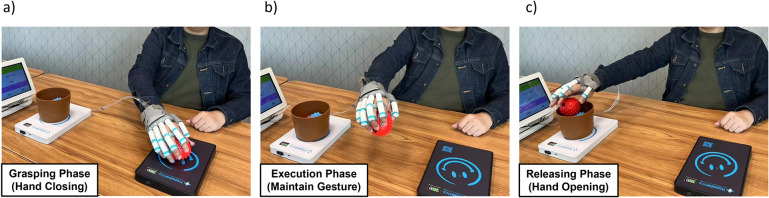
We have developed an interactive system comprising a soft wearable robot hand and a wireless task board, facilitating the interaction between the hand and regular daily objects for task-oriented training in stroke rehabilitation. A ring-reinforced soft actuator (RSA) to accommodate different hand sizes and enable flexion and extension movements was introduced in this paper. Individually controlled finger actuators assist stroke patients during various grasping tasks. A wireless task board was developed to support the training, allowing for the placement of training objects and seamless interaction with the soft robotic hand. Evaluation with seven stroke subjects shows significant improvements in upper limb functions (FMA), hand-motor abilities (ARAT, BBT), and maximum grip strengths after 20 sessions of this task-oriented training. These improvements were observed to persist for at least 3 months post-training. The results demonstrate its potential to enhance stroke rehabilitation and promote hand-motor recovery. This lightweight, user-friendly interactive system facilitates frequent hand practice and easily integrates into regular rehabilitation therapy routines.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


