Electrically Driven, Bioluminescent Compliant Devices for Soft Robotics
IF 8.2
2区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
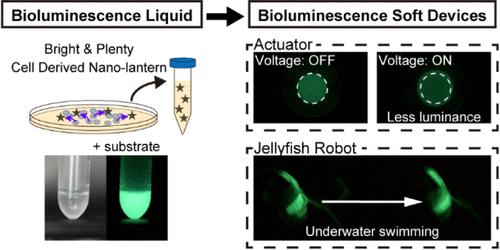
Soft robotics, a research field wherein robots are fabricated from compliant materials, has sparked widespread research interest because of its potential applications in a variety of scenarios. In soft robots, luminescence is an important functionality for communication and information transmission, and it is typically achieved through electroluminescence, which relies on synthetic substances activated by external electric sources, such as batteries. This paper focuses on the use of luciferase, a biologically derived luminescent enzyme, as a luminescent material. Bioluminescence, which is triggered by the luciferin–luciferase reaction, is highly energy-efficient, nontoxic, and eco-friendly. In this regard, a mammalian cell-derived secreted luciferase bioluminescent liquid was developed. This bioluminescent liquid is strongly bright, stable, freezable, and scalable for use as a soft robotic material. To investigate the applicability of this bioluminescent liquid to soft robotics, it was incorporated as an electrode in electrically driven soft actuators, sensors, and robots. Specifically, dielectric elastomer sensors (DESs) and dielectric elastomer actuators (DEAs) were fabricated and characterized using established fabrication processes. The resistivity of the bioluminescent liquid was found to be 448.1 Ω·cm. When the DES was subjected to uniaxial strain, it exhibited a linear response and large deformation of up to 200% strain, with a simultaneous luminance change of 27%. The DEA displayed an areal strain of 46.0% and a luminance change of 31% at an applied voltage of 3.4 kV. The waterproof bending DEA generated a tip angle of 21.8° at 10 kV and was applied to a jellyfish robot that could swim in water at a speed of 2.1 mm/s. The experimental results demonstrated the successful operation of these devices, validating the concept of energy-efficient, safe, and environmentally friendly bioluminescent soft robots.
软机器人的电驱动、生物发光兼容装置
软机器人技术是一个由柔性材料制造机器人的研究领域,由于其在各种场景中的潜在应用而引起了广泛的研究兴趣。在软体机器人中,发光是通信和信息传输的重要功能,通常通过电致发光来实现,电致发光依赖于外部电源(如电池)激活的合成物质。荧光素酶是一种生物衍生的发光酶,本文主要研究荧光素酶作为发光材料的应用。生物发光是由荧光素-荧光素酶反应引发的,具有高能效、无毒、环保的特点。为此,研制了一种哺乳动物细胞源性分泌荧光素酶生物发光液。这种生物发光液体非常明亮,稳定,可冷冻,可伸缩,可用作柔软的机器人材料。为了研究这种生物发光液体在软机器人中的适用性,将其作为电极应用于电动软执行器、传感器和机器人中。具体来说,介质弹性体传感器(DESs)和介质弹性体致动器(dea)是使用既定的制造工艺制造和表征的。生物发光液的电阻率为448.1 Ω·cm。当DES受到单轴应变时,它表现出线性响应和高达200%应变的大变形,同时亮度变化27%。在3.4 kV电压下,DEA的面应变为46.0%,亮度变化为31%。防水弯曲DEA在10 kV下产生21.8°的尖端角,并应用于水母机器人,水母机器人在水中以2.1 mm/s的速度游泳。实验结果证明了这些装置的成功运行,验证了节能、安全、环保的生物发光软机器人的概念。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

ACS Applied Materials & Interfaces
工程技术-材料科学:综合
CiteScore
16.00
自引率
6.30%
发文量
4978
审稿时长
1.8 months
期刊介绍:
ACS Applied Materials & Interfaces is a leading interdisciplinary journal that brings together chemists, engineers, physicists, and biologists to explore the development and utilization of newly-discovered materials and interfacial processes for specific applications. Our journal has experienced remarkable growth since its establishment in 2009, both in terms of the number of articles published and the impact of the research showcased. We are proud to foster a truly global community, with the majority of published articles originating from outside the United States, reflecting the rapid growth of applied research worldwide.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


