Multifunctional Fiber Robotics with Low Mechanical Hysteresis for Magnetic Navigation and Inhaled Gas Sensing
IF 9.1
1区 化学
Q1 CHEMISTRY, ANALYTICAL
引用次数: 0
Abstract
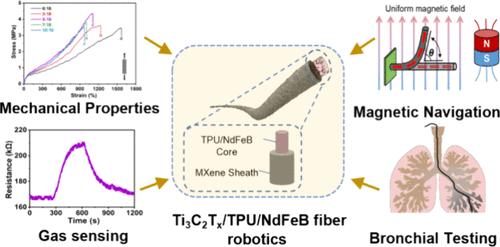
Recently, increasing research attention has been directed toward detecting the distribution of hazardous gases in the respiratory system for potential diagnosis and treatment of lung injury. Among various technologies, magnetic fiber robots exhibit great potential for minimally invasive surgery and in situ disease diagnosis. However, integrating magnetic fibers with functionalized sensitive materials remains challenging while preserving the miniaturized fibers’ mechanical properties. Herein, we report Ti3C2Tx/TPU/NdFeB fibers prepared by facile wet spinning, spray coating, and magnetization, obtaining fibers with decent strength (4.34 MPa) and low hysteresis while maintaining mechanical robustness and magnetoelectric properties. Such fiber robotics could be magnetically actuated for complex movement, while the surface-coated MXene endowed them with the specific response of 5.2% to 40 ppm of triethylamine gas. Fiber robotics realized magnetically driven omnidirectional steering and navigation for propulsion in tubular environments by combination with nitinol guide wires. Consequently, based on magnetic navigation and the chemiresistive gas response, the proposed fiber robotics could locate the position with the highest level of the triethylamine gas inside a bronchial model and provide information on its distribution. This provides a proof-of-concept demonstration for inhaled hazardous gas detection and minimally invasive robotic surgery by multifunctional fiber robotics.
用于磁导航和吸入气体传感的低机械滞后多功能光纤机器人
近年来,越来越多的研究关注于检测呼吸系统中有害气体的分布,以潜在地诊断和治疗肺损伤。在各种技术中,磁性纤维机器人在微创手术和原位疾病诊断方面显示出巨大的潜力。然而,将磁性纤维与功能化敏感材料集成在一起,同时保持微型化纤维的机械性能仍然具有挑战性。本文报道了通过易湿纺丝、喷涂和磁化制备Ti3C2Tx/TPU/NdFeB纤维,获得了良好的强度(4.34 MPa)和低迟滞的纤维,同时保持了机械鲁棒性和磁电性能。这种纤维机器人可以通过磁力驱动进行复杂的运动,而表面涂层的MXene赋予它们在5.2%到40 ppm的三乙胺气体中具有特定的响应。光纤机器人通过结合镍钛诺导丝,实现了管状环境下推进系统的磁力驱动全方位转向和导航。因此,基于磁导航和化学气体响应,所提出的光纤机器人可以定位支气管模型中三乙胺气体含量最高的位置,并提供其分布信息。这为多功能纤维机器人吸入有害气体检测和微创机器人手术提供了概念验证演示。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

ACS Sensors
Chemical Engineering-Bioengineering
CiteScore
14.50
自引率
3.40%
发文量
372
期刊介绍:
ACS Sensors is a peer-reviewed research journal that focuses on the dissemination of new and original knowledge in the field of sensor science, particularly those that selectively sense chemical or biological species or processes. The journal covers a broad range of topics, including but not limited to biosensors, chemical sensors, gas sensors, intracellular sensors, single molecule sensors, cell chips, and microfluidic devices. It aims to publish articles that address conceptual advances in sensing technology applicable to various types of analytes or application papers that report on the use of existing sensing concepts in new ways or for new analytes.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


