Collective Reconfiguration and Propulsion Behaviors of Chlorella-Based Biohybrid Magnetic Microrobot Swarm
IF 8.2
2区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
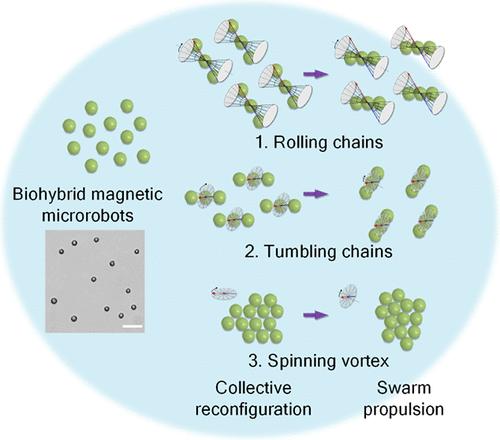
Magnetic microrobots hold great promise for applications in drug delivery and environmental remediation, but achieving collective reconfiguration and effective propulsion for dense, motile magnetic microrobots remains a significant challenge. In this research, we have fabricated Chlorella-based biohybrid magnetic microrobots in bulk using a facile biotemplating process and studied their superior reconfiguration and propulsion performance. Our results show that the dispersed superparamagnetic individuals can self-organize into a swarm of chain-like multimers, achieving effective propulsion via rolling or tumbling modes. The near-bound locomotion process demonstrates pseudochiral periodic reciprocation properties, and a detailed morphological analysis has been conducted. Furthermore, the microrobots can form vortices and realize swarm propulsion in spinning mode. These findings indicate that the spheroidal microrobots exhibit high maneuverability in programmable self-assembly, collective reconfiguration, and swarm propulsion based on dynamic magnetic interactions. In summary, this research provides a feasible method for constructing reconfigurable magnetic microrobots and explores an applicable paradigm for their flexible swarm control and collective cooperation. These advances have significant implications for practical applications of magnetic microrobots in various fields.
基于小球藻的生物混合磁性微机器人群的集体重构与推进行为
磁性微机器人在药物输送和环境修复方面有着巨大的应用前景,但实现密集、可移动的磁性微机器人的集体重构和有效推进仍然是一个重大挑战。在本研究中,我们采用简单的生物模板工艺批量制备了基于小球藻的生物混合磁性微型机器人,并研究了其优越的重构和推进性能。我们的研究结果表明,分散的超顺磁个体可以自组织成一群链状多定时器,通过滚动或翻滚模式实现有效的推进。近界运动过程表现出伪手性周期性往复特性,并进行了详细的形态学分析。此外,微机器人还能在旋转模式下形成涡流,实现群体推进。这些发现表明,球面微机器人在可编程自组装、集体重构和基于动态磁相互作用的群体推进方面具有很高的可操作性。综上所述,本研究为构建可重构磁微机器人提供了一种可行的方法,并为其柔性群体控制和集体合作探索了一种适用的范例。这些进展对磁微机器人在各个领域的实际应用具有重要意义。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

ACS Applied Materials & Interfaces
工程技术-材料科学:综合
CiteScore
16.00
自引率
6.30%
发文量
4978
审稿时长
1.8 months
期刊介绍:
ACS Applied Materials & Interfaces is a leading interdisciplinary journal that brings together chemists, engineers, physicists, and biologists to explore the development and utilization of newly-discovered materials and interfacial processes for specific applications. Our journal has experienced remarkable growth since its establishment in 2009, both in terms of the number of articles published and the impact of the research showcased. We are proud to foster a truly global community, with the majority of published articles originating from outside the United States, reflecting the rapid growth of applied research worldwide.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


