Particulate matter source localization in dynamic indoor environments: Bridging simulation-experimentation gaps with a 3D multi-robot system
IF 12.2
1区 环境科学与生态学
Q1 ENGINEERING, ENVIRONMENTAL
引用次数: 0
Abstract
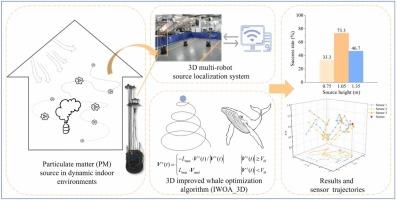
Indoor particulate matter (PM) threatens human health, compromises product quality and yield, and poses safety risks. Dynamic indoor environments introduce unpredictable airflow changes and complex PM behavior, posing significant challenges for accurate PM source localization by mobile robots. This study introduces our self-developed multi-robot system for three-dimensional (3D) concentration detection, bridging the gap between simulation and real-world applications. A total of 225 experiments across 15 cases were conducted in a dynamic ventilation environment, enabling a comprehensive analysis of airflow dynamics and PM behavior. The improved whale optimization algorithm (IWOA) was compared in 3D and 2D scenarios and further evaluated against the improved particle swarm optimization (IPSO) method under 3D conditions. The adaptability of IWOA_3D to variations in PM size, release rate, source location, and accuracy standard was also investigated. Using the success rate as a key evaluation criterion, IWOA_3D demonstrated strong adaptability to variations in source height, localizing PM2.5 at 1.05 m with a 73.3% success rate, despite limitations related to PM size and source location. These findings highlight the importance of selecting appropriate PM sensor readings and optimizing localization strategies in dynamic indoor environments, while demonstrating the practical effectiveness of the IWOA_3D method.
求助全文
约1分钟内获得全文
求助全文
来源期刊

Journal of Hazardous Materials
工程技术-工程:环境
CiteScore
25.40
自引率
5.90%
发文量
3059
审稿时长
58 days
期刊介绍:
The Journal of Hazardous Materials serves as a global platform for promoting cutting-edge research in the field of Environmental Science and Engineering. Our publication features a wide range of articles, including full-length research papers, review articles, and perspectives, with the aim of enhancing our understanding of the dangers and risks associated with various materials concerning public health and the environment. It is important to note that the term "environmental contaminants" refers specifically to substances that pose hazardous effects through contamination, while excluding those that do not have such impacts on the environment or human health. Moreover, we emphasize the distinction between wastes and hazardous materials in order to provide further clarity on the scope of the journal. We have a keen interest in exploring specific compounds and microbial agents that have adverse effects on the environment.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


