Hua Cheng, Yang Zhang, Huangxin Xu, Dingliang Li, Zejian Zhong, Yinchuan Zhao, Zhuo Yan
{"title":"MSGU-Net: a lightweight multi-scale ghost U-Net for image segmentation.","authors":"Hua Cheng, Yang Zhang, Huangxin Xu, Dingliang Li, Zejian Zhong, Yinchuan Zhao, Zhuo Yan","doi":"10.3389/fnbot.2024.1480055","DOIUrl":null,"url":null,"abstract":"<p><p>U-Net and its variants have been widely used in the field of image segmentation. In this paper, a lightweight multi-scale Ghost U-Net (MSGU-Net) network architecture is proposed. This can efficiently and quickly process image segmentation tasks while generating high-quality object masks for each object. The pyramid structure (SPP-Inception) module and ghost module are seamlessly integrated in a lightweight manner. Equipped with an efficient local attention (ELA) mechanism and an attention gate mechanism, they are designed to accurately identify the region of interest (ROI). The SPP-Inception module and ghost module work in tandem to effectively merge multi-scale information derived from low-level features, high-level features, and decoder masks at each stage. Comparative experiments were conducted between the proposed MSGU-Net and state-of-the-art networks on the ISIC2017 and ISIC2018 datasets. In short, compared to the baseline U-Net, our model achieves superior segmentation performance while reducing parameter and computation costs by 96.08 and 92.59%, respectively. Moreover, MSGU-Net can serve as a lightweight deep neural network suitable for deployment across a range of intelligent devices and mobile platforms, offering considerable potential for widespread adoption.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1480055"},"PeriodicalIF":2.8000,"publicationDate":"2025-01-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11743674/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1480055","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
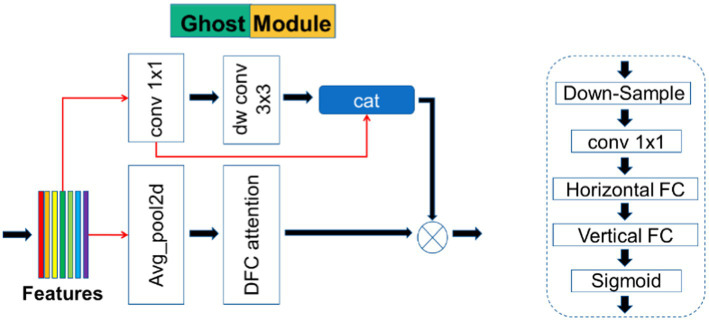
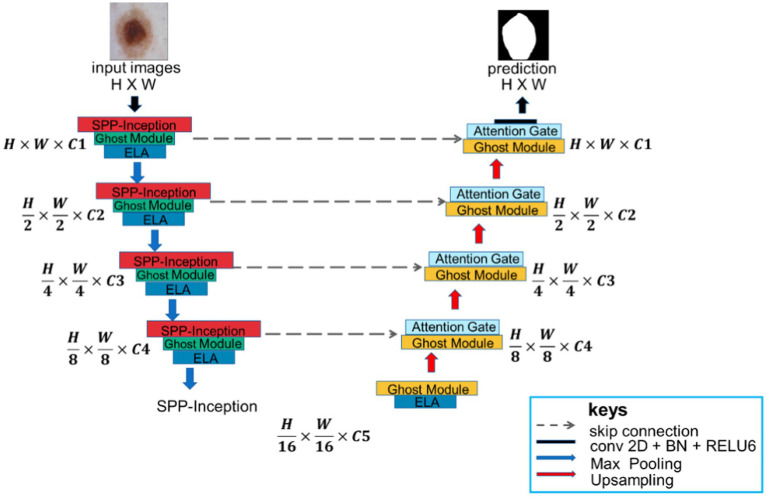
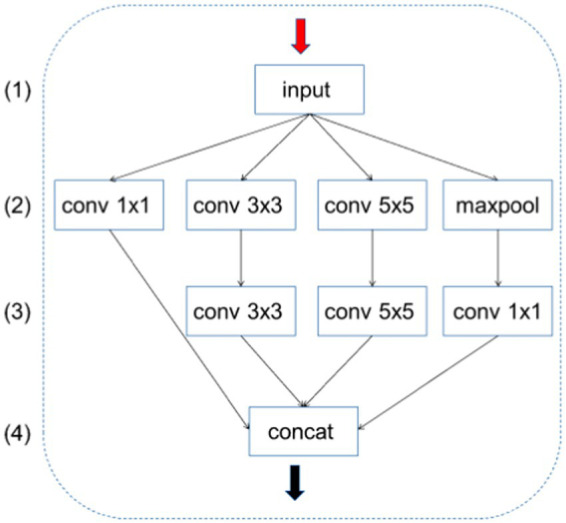
U-Net and its variants have been widely used in the field of image segmentation. In this paper, a lightweight multi-scale Ghost U-Net (MSGU-Net) network architecture is proposed. This can efficiently and quickly process image segmentation tasks while generating high-quality object masks for each object. The pyramid structure (SPP-Inception) module and ghost module are seamlessly integrated in a lightweight manner. Equipped with an efficient local attention (ELA) mechanism and an attention gate mechanism, they are designed to accurately identify the region of interest (ROI). The SPP-Inception module and ghost module work in tandem to effectively merge multi-scale information derived from low-level features, high-level features, and decoder masks at each stage. Comparative experiments were conducted between the proposed MSGU-Net and state-of-the-art networks on the ISIC2017 and ISIC2018 datasets. In short, compared to the baseline U-Net, our model achieves superior segmentation performance while reducing parameter and computation costs by 96.08 and 92.59%, respectively. Moreover, MSGU-Net can serve as a lightweight deep neural network suitable for deployment across a range of intelligent devices and mobile platforms, offering considerable potential for widespread adoption.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


