{"title":"Perception and Recognition of Proximity and Contact Processes via Parallel Double-Transistor Configuration","authors":"Shixin Liu, Jiawei Xu, Wanyu Zeng, Anthon Qin, Wandi Zhao, Duanyang Liu, Qun Zhang, Guodong Zhu","doi":"10.1002/adfm.202422733","DOIUrl":null,"url":null,"abstract":"<p>The explosive development and applications ofhuman-machine interaction technologies and products not only promote theexploration but also propose more severe requirements on flexible electronicsensors. A sensor integrated with both proximity and contact perceptionfunctions is highly expected for an intelligent robot to pre-evaluate positionand shape of an approaching target so as to perform appropriate grasping actionor pre-perceive obstacles for avoidance operation. Based on both electrostaticinduction and piezoelectric mechanisms, piezoelectric thin film transistorspossess both proximity and tactile perception functions. However, effectiverecognition of approach and contact processes is still challenging in a blindsensing condition. Here, a parallel double-transistor configuration with apiezoelectric capacitor as sensing end is put forward. Both transistors exhibitin-phase drain current response during approach process while out-of-phaseresponse during contact process, as is utilized to precisely detect andrecognize both processes. This parallel double-transistor configuration isfurther assembled onto a robotic claw to feedback control the claw when and howto grasp the target. This parallel double-transistor configuration provides afeasible and effective measure for piezoelectric transistors to detect anddistinguish both non-contact and contact processes.</p>","PeriodicalId":112,"journal":{"name":"Advanced Functional Materials","volume":"35 22","pages":""},"PeriodicalIF":19.0000,"publicationDate":"2025-01-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Functional Materials","FirstCategoryId":"88","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adfm.202422733","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
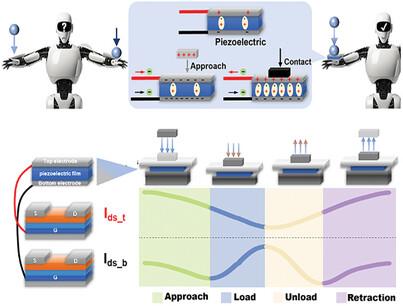
The explosive development and applications ofhuman-machine interaction technologies and products not only promote theexploration but also propose more severe requirements on flexible electronicsensors. A sensor integrated with both proximity and contact perceptionfunctions is highly expected for an intelligent robot to pre-evaluate positionand shape of an approaching target so as to perform appropriate grasping actionor pre-perceive obstacles for avoidance operation. Based on both electrostaticinduction and piezoelectric mechanisms, piezoelectric thin film transistorspossess both proximity and tactile perception functions. However, effectiverecognition of approach and contact processes is still challenging in a blindsensing condition. Here, a parallel double-transistor configuration with apiezoelectric capacitor as sensing end is put forward. Both transistors exhibitin-phase drain current response during approach process while out-of-phaseresponse during contact process, as is utilized to precisely detect andrecognize both processes. This parallel double-transistor configuration isfurther assembled onto a robotic claw to feedback control the claw when and howto grasp the target. This parallel double-transistor configuration provides afeasible and effective measure for piezoelectric transistors to detect anddistinguish both non-contact and contact processes.
期刊介绍:
Firmly established as a top-tier materials science journal, Advanced Functional Materials reports breakthrough research in all aspects of materials science, including nanotechnology, chemistry, physics, and biology every week.
Advanced Functional Materials is known for its rapid and fair peer review, quality content, and high impact, making it the first choice of the international materials science community.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


