{"title":"Pattern architected soft magnetic actuation†","authors":"Dharmi Chand and Sivakumar M. Srinivasan","doi":"10.1039/D4SM01450B","DOIUrl":null,"url":null,"abstract":"<p >Bioinspired shape-morphing soft magnetic actuators have potential applications in medicine, robotics, and engineering due to their soft body, untethered control, and infinite degrees of freedom. The shape programming of the soft magnetic actuators (consisting of soft ferromagnetic CI particles in a soft matrix) is an involved task, as it requires a moulding process severely limiting the capability to program complex shapes. The current study explores a shape programming technique that architects the particle pattern configuration in the actuator, mimicking the pattern found in the mould-programmed actuator, thereby eliminating the need for a mould and providing a greater capability of programming complex shapes. At first, actuators with some basic shapes are prepared using the mould programming technique and examined under a microscope to understand the configuration of particle alignment patterns in different shapes. Then, the pattern is architected using magnetic units in the soft matrix to eliminate the need for mould for shape programming. In this study, the programmed soft actuators are characterized for shape morphing and locomotion capability under an external actuating magnetic field. The crawler was found to move at a velocity of 3 mm s<small><sup>−1</sup></small> under a periodic magnetic field of 1 Hz. The designed actuators are found to quickly respond to the magnetic field thereby generating the desired shapes.</p>","PeriodicalId":103,"journal":{"name":"Soft Matter","volume":" 6","pages":" 1072-1084"},"PeriodicalIF":2.8000,"publicationDate":"2025-01-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Matter","FirstCategoryId":"92","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2025/sm/d4sm01450b","RegionNum":3,"RegionCategory":"化学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
引用次数: 0
Abstract
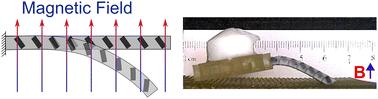
Bioinspired shape-morphing soft magnetic actuators have potential applications in medicine, robotics, and engineering due to their soft body, untethered control, and infinite degrees of freedom. The shape programming of the soft magnetic actuators (consisting of soft ferromagnetic CI particles in a soft matrix) is an involved task, as it requires a moulding process severely limiting the capability to program complex shapes. The current study explores a shape programming technique that architects the particle pattern configuration in the actuator, mimicking the pattern found in the mould-programmed actuator, thereby eliminating the need for a mould and providing a greater capability of programming complex shapes. At first, actuators with some basic shapes are prepared using the mould programming technique and examined under a microscope to understand the configuration of particle alignment patterns in different shapes. Then, the pattern is architected using magnetic units in the soft matrix to eliminate the need for mould for shape programming. In this study, the programmed soft actuators are characterized for shape morphing and locomotion capability under an external actuating magnetic field. The crawler was found to move at a velocity of 3 mm s−1 under a periodic magnetic field of 1 Hz. The designed actuators are found to quickly respond to the magnetic field thereby generating the desired shapes.
期刊介绍:
Soft Matter is an international journal published by the Royal Society of Chemistry using Engineering-Materials Science: A Synthesis as its research focus. It publishes original research articles, review articles, and synthesis articles related to this field, reporting the latest discoveries in the relevant theoretical, practical, and applied disciplines in a timely manner, and aims to promote the rapid exchange of scientific information in this subject area. The journal is an open access journal. The journal is an open access journal and has not been placed on the alert list in the last three years.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


