An Agile 3 cm‐Scale Quadruped Piezoelectric Robot with a Rigid Ring‐Shaped Structure
IF 18.5
1区 材料科学
Q1 CHEMISTRY, MULTIDISCIPLINARY
引用次数: 0
Abstract
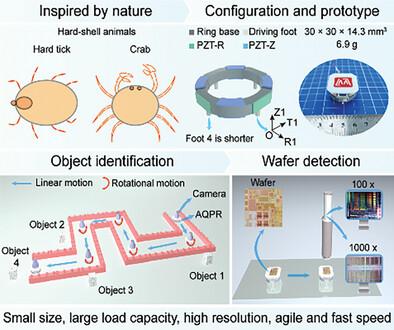
Miniature piezoelectric robots can perform various tasks in narrow spaces, due to their small sizes and agile motions. However, there is key challenge of reconciling large load capacity with agile motions, which limits the integration of functional units. In this work, a miniature agile quadruped piezoelectric robot (AQPR) inspired by hard‐shell animals is proposed. The prominent feature of AQPR is the rigid ring structure, which can be utilized to achieve large load capacity with its high stiffness; the degeneracy of different vibration modes is used to generate multi‐dimensional trajectories at the foot, which can achieve linear and rotational motions. A prototype with size of 30 × 30 × 14.3 mm
具有刚性环形结构的敏捷3厘米尺度四足压电机器人
微型压电机器人由于体积小、运动灵活,可以在狭窄的空间内执行各种任务。然而,如何协调大负载能力与敏捷运动之间的关系是一个关键挑战,这限制了功能单元的集成。本研究受硬壳动物启发,提出了一种微型敏捷四足压电机器人(AQPR)。AQPR 的突出特点是采用刚性环状结构,利用其高刚度实现大负载能力;利用不同振动模式的退化性在脚部产生多维轨迹,实现直线和旋转运动。制作的原型尺寸为 30 × 30 × 14.3 mm3,重量为 6.9 g。实验结果表明,最大线速度和旋转速度分别为 255 mm s-1 和 1265°s-1。负载能力达到 200 克(≈30 倍自重)。通过使用脉冲信号,直线运动和旋转运动的分辨率分别达到 0.25 µm 和 32.7 µrad。AQPR 具有体积小、承载能力大、分辨率高、动作敏捷、速度快等优点,在狭窄空间的微操作(如大规模晶片运输和检测)方面显示出巨大的应用潜力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Advanced Functional Materials
工程技术-材料科学:综合
CiteScore
29.50
自引率
4.20%
发文量
2086
审稿时长
2.1 months
期刊介绍:
Firmly established as a top-tier materials science journal, Advanced Functional Materials reports breakthrough research in all aspects of materials science, including nanotechnology, chemistry, physics, and biology every week.
Advanced Functional Materials is known for its rapid and fair peer review, quality content, and high impact, making it the first choice of the international materials science community.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


