Magneto-Photochemically Responsive Liquid Crystal Elastomer for Underwater Actuation
IF 8.2
2区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
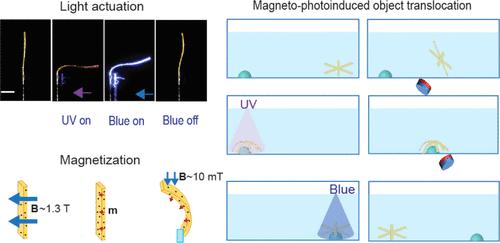
The quest for small-scale, remotely controlled soft robots has led to the exploration of magnetic and optical fields for inducing shape morphing in soft materials. Magnetic stimulus excels when navigation in confined or optically opaque environments is required. Optical stimulus, in turn, boasts superior spatial precision and individual control over multiple objects. Herein, we bring these two methodologies together and present a monolithic liquid crystal elastomer (LCE) system that synergistically combines magnetic and photochemical actuation schemes. The resultant composite material showcases versatile possibilities for underwater actuation, and we demonstrate robotic functionalities where the optical and magnetic response can be leveraged in different tasks (object gripping and object translocation, respectively) or where light can be used as a control signal to tune the magnetically induced actuation. Combining these two remote actuation methods offers powerful, dual-mode control in wireless, small-scale robotics, especially in submersed environments due to their isothermal nature.
水下驱动磁光化学响应液晶弹性体
对小型、远程控制的软机器人的追求导致了对磁场和光场的探索,以诱导软材料的形状变形。磁刺激在受限或光学不透明环境下的导航中表现出色。反过来,光刺激具有优越的空间精度和对多个物体的单独控制。在此,我们将这两种方法结合在一起,提出了一种单片液晶弹性体(LCE)系统,该系统协同结合了磁性和光化学驱动方案。合成的复合材料展示了水下驱动的多种可能性,我们展示了机器人的功能,其中光学和磁响应可以在不同的任务中被利用(分别是物体抓取和物体移位),或者光可以作为控制信号来调节磁感应驱动。结合这两种远程驱动方法,为无线、小型机器人提供了强大的双模式控制,特别是在水下环境中,由于它们的等温性质。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

ACS Applied Materials & Interfaces
工程技术-材料科学:综合
CiteScore
16.00
自引率
6.30%
发文量
4978
审稿时长
1.8 months
期刊介绍:
ACS Applied Materials & Interfaces is a leading interdisciplinary journal that brings together chemists, engineers, physicists, and biologists to explore the development and utilization of newly-discovered materials and interfacial processes for specific applications. Our journal has experienced remarkable growth since its establishment in 2009, both in terms of the number of articles published and the impact of the research showcased. We are proud to foster a truly global community, with the majority of published articles originating from outside the United States, reflecting the rapid growth of applied research worldwide.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


