Yang Bai, Phuoc Thanh Tran Ngoc, Huu Duoc Nguyen, Duc Long Le, Quang Huy Ha, Kazuki Kai, Yu Xiang See To, Yaosheng Deng, Jie Song, Naoki Wakamiya, Hirotaka Sato, Masaki Ogura
{"title":"Swarm navigation of cyborg-insects in unknown obstructed soft terrain","authors":"Yang Bai, Phuoc Thanh Tran Ngoc, Huu Duoc Nguyen, Duc Long Le, Quang Huy Ha, Kazuki Kai, Yu Xiang See To, Yaosheng Deng, Jie Song, Naoki Wakamiya, Hirotaka Sato, Masaki Ogura","doi":"10.1038/s41467-024-55197-8","DOIUrl":null,"url":null,"abstract":"<p>Cyborg insects refer to hybrid robots that integrate living insects with miniature electronic controllers to enable robotic-like programmable control. These creatures exhibit advantages over conventional robots in adaption to complex terrain and sustained energy efficiency. Nevertheless, there is a lack of literature on the control of multi-cyborg systems. This research gap is due to the difficulty in coordinating the movements of a cyborg system under the presence of insects’ inherent individual variability in their reactions to control input. Regarding this issue, we propose a swarm navigation algorithm and verify it under experiments. This research advances swarm robotics by integrating biological organisms with control theory to develop intelligent autonomous systems for real-world applications.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"27 1","pages":""},"PeriodicalIF":15.7000,"publicationDate":"2025-01-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-024-55197-8","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
引用次数: 0
Abstract
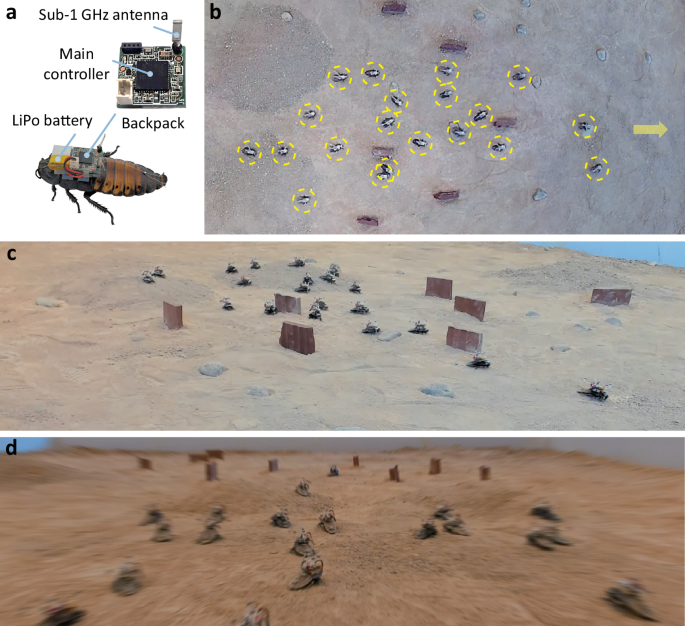
Cyborg insects refer to hybrid robots that integrate living insects with miniature electronic controllers to enable robotic-like programmable control. These creatures exhibit advantages over conventional robots in adaption to complex terrain and sustained energy efficiency. Nevertheless, there is a lack of literature on the control of multi-cyborg systems. This research gap is due to the difficulty in coordinating the movements of a cyborg system under the presence of insects’ inherent individual variability in their reactions to control input. Regarding this issue, we propose a swarm navigation algorithm and verify it under experiments. This research advances swarm robotics by integrating biological organisms with control theory to develop intelligent autonomous systems for real-world applications.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


