A R García-Escalante, R Q Fuentes-Aguilar, A Palma-Zubia, E Morales-Vargas
{"title":"Automatic brake Driver Assistance System based on deep learning and fuzzy logic.","authors":"A R García-Escalante, R Q Fuentes-Aguilar, A Palma-Zubia, E Morales-Vargas","doi":"10.1371/journal.pone.0308858","DOIUrl":null,"url":null,"abstract":"<p><p>Advanced Driver Assistance Systems (ADAS) aim to automate transportation fully. A key part of this automation includes tasks such as traffic light detection and automatic braking. While indoor experiments are prevalent due to computational demands and safety concerns, there is a pressing need for research and development of new features to achieve complete automation, addressing real-world implementation challenges by testing them in outdoor environments. These systems seek to provide precise synchronization for decision-making processes and explore algorithms beyond emergency responses, enabling braking actions with short reaction times. Therefore, this work proposes a level 1 ADAS for automatic braking. The implementation uses an NVIDIA Jetson TX2 and a ZED stereo camera for traffic light detection, which, in addition to the depth map provided by the camera and a fuzzy inference system, make the decision to perform automatic braking based on the distance and current state of the traffic light. The contributions of this research work are the development and validation of a one-stage traffic light state detector using EfficientDet D0, a brake profile using fuzzy logic, and the validation with an on-road experiment in Mexico. The traffic light detection model obtained a mAP of 0.96 for distances less than 13 m and 0.89 for 15 m, with an average RMSE of 0.9 m and 0.05 m in the braking force applied, respectively. Integrated systems have a response time of 0.23 s, taking a step further in the state-of-the-art.</p>","PeriodicalId":20189,"journal":{"name":"PLoS ONE","volume":"19 12","pages":"e0308858"},"PeriodicalIF":2.6000,"publicationDate":"2024-12-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11687752/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"PLoS ONE","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1371/journal.pone.0308858","RegionNum":3,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
引用次数: 0
Abstract
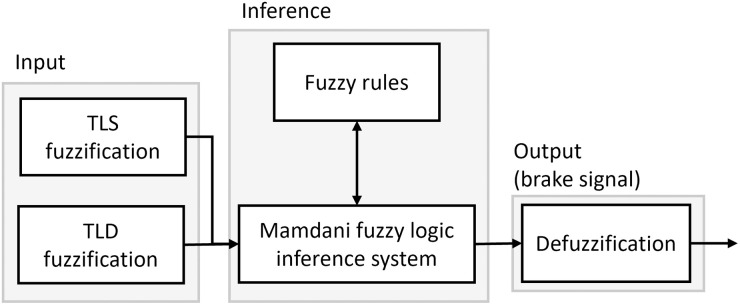
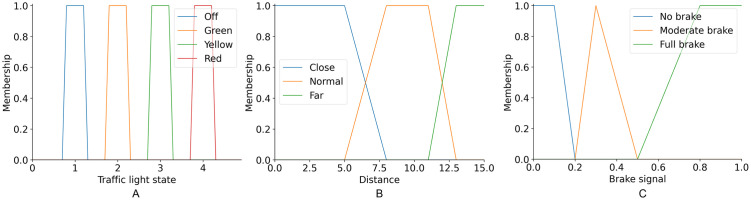
Advanced Driver Assistance Systems (ADAS) aim to automate transportation fully. A key part of this automation includes tasks such as traffic light detection and automatic braking. While indoor experiments are prevalent due to computational demands and safety concerns, there is a pressing need for research and development of new features to achieve complete automation, addressing real-world implementation challenges by testing them in outdoor environments. These systems seek to provide precise synchronization for decision-making processes and explore algorithms beyond emergency responses, enabling braking actions with short reaction times. Therefore, this work proposes a level 1 ADAS for automatic braking. The implementation uses an NVIDIA Jetson TX2 and a ZED stereo camera for traffic light detection, which, in addition to the depth map provided by the camera and a fuzzy inference system, make the decision to perform automatic braking based on the distance and current state of the traffic light. The contributions of this research work are the development and validation of a one-stage traffic light state detector using EfficientDet D0, a brake profile using fuzzy logic, and the validation with an on-road experiment in Mexico. The traffic light detection model obtained a mAP of 0.96 for distances less than 13 m and 0.89 for 15 m, with an average RMSE of 0.9 m and 0.05 m in the braking force applied, respectively. Integrated systems have a response time of 0.23 s, taking a step further in the state-of-the-art.
期刊介绍:
PLOS ONE is an international, peer-reviewed, open-access, online publication. PLOS ONE welcomes reports on primary research from any scientific discipline. It provides:
* Open-access—freely accessible online, authors retain copyright
* Fast publication times
* Peer review by expert, practicing researchers
* Post-publication tools to indicate quality and impact
* Community-based dialogue on articles
* Worldwide media coverage


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


