Mechano-Graded Contact-Electrification Interfaces Based Artificial Mechanoreceptors for Robotic Adaptive Reception
IF 16
1区 材料科学
Q1 CHEMISTRY, MULTIDISCIPLINARY
引用次数: 0
Abstract
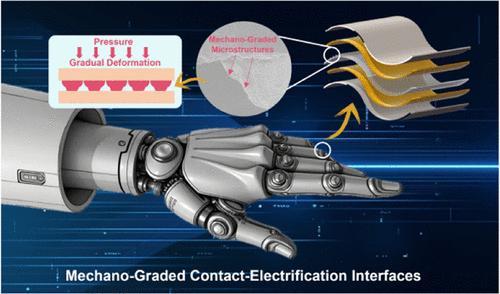
Triboelectrification-based artificial mechanoreceptors (TBAMs) is able to convert mechanical stimuli directly into electrical signals, realizing self-adaptive protection and human–machine interactions of robots. However, traditional contact–electrification interfaces are prone to reaching their deformation limits under large pressures, resulting in a relatively narrow linear range. In this work, we fabricated mechano-graded microstructures to modulate the strain behavior of contact–electrification interfaces, simultaneously endowing the TBAMs with a high sensitivity and a wide linear detection range. The presence of step regions within the mechanically graded microstructures helps contact–electrification interfaces resist fast compressive deformation and provides a large effective area. The highly sensitive linear region of TBAM with 1.18 V/kPa can be effectively extended to four times of that for the devices with traditional interfaces. In addition, the device is able to maintain a high sensitivity of 0.44 V/kPa even under a large pressure from 40 to 600 kPa. TBAM has been successfully used as an electronic skin to realize self-adaptive protection and grip strength perception for a commercial robot arm. Finally, a high angle resolution of 2° and an excellent linearity of 99.78% for joint bending detection were also achieved. With the aid of a convolutional neural network algorithm, a data glove based on TBAMs realizes a high accuracy rate of 95.5% for gesture recognition in a dark environment.
基于机械梯度接触电气化界面的机器人自适应接收人工机械感受器
基于摩擦电的人工机械感受器(tbam)能够将机械刺激直接转化为电信号,实现机器人的自适应保护和人机交互。然而,传统的接触-通电界面在大压力下容易达到其变形极限,导致线性范围相对较窄。在这项工作中,我们制作了机械梯度微结构来调节接触-通电界面的应变行为,同时赋予tbam高灵敏度和宽线性检测范围。在机械梯度微结构中,台阶区域的存在有助于接触-带电界面抵抗快速压缩变形,并提供较大的有效面积。对于具有传统接口的器件,1.18 V/kPa TBAM的高敏感线性区可以有效地扩展到其线性区的4倍。此外,即使在40 ~ 600 kPa的大压力下,该器件也能保持0.44 V/kPa的高灵敏度。TBAM已成功用于商用机械臂的电子皮肤,实现了自适应保护和握力感知。最后,实现了2°的高角度分辨率和99.78%的良好线性度。在卷积神经网络算法的帮助下,基于tbam的数据手套在黑暗环境下实现了高达95.5%的手势识别准确率。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

ACS Nano
工程技术-材料科学:综合
CiteScore
26.00
自引率
4.10%
发文量
1627
审稿时长
1.7 months
期刊介绍:
ACS Nano, published monthly, serves as an international forum for comprehensive articles on nanoscience and nanotechnology research at the intersections of chemistry, biology, materials science, physics, and engineering. The journal fosters communication among scientists in these communities, facilitating collaboration, new research opportunities, and advancements through discoveries. ACS Nano covers synthesis, assembly, characterization, theory, and simulation of nanostructures, nanobiotechnology, nanofabrication, methods and tools for nanoscience and nanotechnology, and self- and directed-assembly. Alongside original research articles, it offers thorough reviews, perspectives on cutting-edge research, and discussions envisioning the future of nanoscience and nanotechnology.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


