Luminescent Tactile Sensor System for Robots: Enhancing Human–Computer Interaction in Complex Dark Environments
IF 13
2区 材料科学
Q1 CHEMISTRY, MULTIDISCIPLINARY
引用次数: 0
Abstract
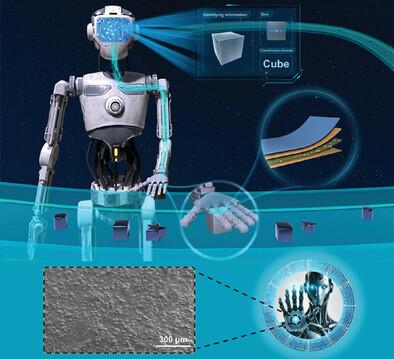
In order to achieve interaction and collaboration with humans, robots need to have the ability for tactile perception of simulating human. Traditional methods use electrically connected sensors with complex arrays, leading to intricate wiring, high manufacturing costs, and demanding current environments. A flexible sensor with simple structure, easy preparation process, and low cost based on triboluminescence effect is proposed in this paper, which avoids the complex array and wiring of traditional sensors. The study discusses the relationship between luminescent intensity and factors such as luminescent particle content, luminescent layer thickness, encapsulation layer thickness, and friction layer thickness. It also analyzes the mechanism of luminescence. A micro charge-coupled device is configured for the luminescent unit to collect optical information and is integrated with the robot's manipulator for testing. A simple sensing system is constructed to demonstrate environmental perception, acquiring, and feeding back shape and size information of contact objects in the dark. The system successfully identifies and judges target objects in complex dark environments, offering insights for applications such as unmanned assembly lines. It overcomes the challenge of intricate electrical connections, paving new avenues for intelligent object recognition research in human–computer interaction.
求助全文
约1分钟内获得全文
求助全文
来源期刊

Small
工程技术-材料科学:综合
CiteScore
17.70
自引率
3.80%
发文量
1830
审稿时长
2.1 months
期刊介绍:
Small serves as an exceptional platform for both experimental and theoretical studies in fundamental and applied interdisciplinary research at the nano- and microscale. The journal offers a compelling mix of peer-reviewed Research Articles, Reviews, Perspectives, and Comments.
With a remarkable 2022 Journal Impact Factor of 13.3 (Journal Citation Reports from Clarivate Analytics, 2023), Small remains among the top multidisciplinary journals, covering a wide range of topics at the interface of materials science, chemistry, physics, engineering, medicine, and biology.
Small's readership includes biochemists, biologists, biomedical scientists, chemists, engineers, information technologists, materials scientists, physicists, and theoreticians alike.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


