{"title":"Janus Spherical Robot With Multiple Wettabilities for Droplet/ Bubble Manipulation","authors":"Zihao Zhao, Shiping He, Anhui Yu, Shaochen Wang, Huayang Zhang, Zhiguang Guo","doi":"10.1002/adfm.202418725","DOIUrl":null,"url":null,"abstract":"<p>The flexible manipulation and directional transport of fluids, including droplets and bubbles, are foundational to numerous applications. Fluid manipulation based on external field stimulation and fixed structures has a wide range of applications in both natural and artificial materials, such as water collection, water electrolysis, droplet energy collection, medical diagnosis, etc. However, droplets and bubbles exhibit opposite wettability, and the inherent opposition between hydrophilicity and hydrophobicity presents a significant challenge in developing a manipulation system capable of manipulating both droplets and bubbles. Here, inspired by multiple natural organisms, a magnetic-actuated Janus spherical robot with switchable wettability as the driving core of droplets or bubbles, and a solid-like slippery surface as the manipulation platform is proposed, which achieves the dual programmable manipulation of droplets and bubbles. Furthermore, the Janus robot can achieve the transition from superhydrophobic to superhydrophilic within 8 min under UV light. It is noteworthy that the Janus robot demonstrates superior capabilities in the transport speed and carrier volume of liquid droplets (bubbles), which can reach 18 (13) cm s<sup>−1</sup> and 800 (500) µL, respectively. This strategy provides a novel and reliable method for the automated manipulation of droplets and bubbles and broadens their applications.</p>","PeriodicalId":112,"journal":{"name":"Advanced Functional Materials","volume":"35 16","pages":""},"PeriodicalIF":18.5000,"publicationDate":"2024-12-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Functional Materials","FirstCategoryId":"88","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adfm.202418725","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
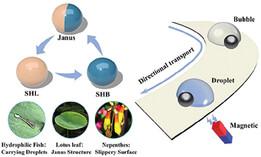
The flexible manipulation and directional transport of fluids, including droplets and bubbles, are foundational to numerous applications. Fluid manipulation based on external field stimulation and fixed structures has a wide range of applications in both natural and artificial materials, such as water collection, water electrolysis, droplet energy collection, medical diagnosis, etc. However, droplets and bubbles exhibit opposite wettability, and the inherent opposition between hydrophilicity and hydrophobicity presents a significant challenge in developing a manipulation system capable of manipulating both droplets and bubbles. Here, inspired by multiple natural organisms, a magnetic-actuated Janus spherical robot with switchable wettability as the driving core of droplets or bubbles, and a solid-like slippery surface as the manipulation platform is proposed, which achieves the dual programmable manipulation of droplets and bubbles. Furthermore, the Janus robot can achieve the transition from superhydrophobic to superhydrophilic within 8 min under UV light. It is noteworthy that the Janus robot demonstrates superior capabilities in the transport speed and carrier volume of liquid droplets (bubbles), which can reach 18 (13) cm s−1 and 800 (500) µL, respectively. This strategy provides a novel and reliable method for the automated manipulation of droplets and bubbles and broadens their applications.
流体(包括液滴和气泡)的灵活操纵和定向输送是许多应用的基础。基于外场刺激和固定结构的流体操纵在自然和人工材料中都有广泛的应用,如水收集、水电解、液滴能量收集、医疗诊断等。然而,液滴和气泡表现出相反的润湿性,亲水性和疏水性之间的固有对立对开发能够同时操纵液滴和气泡的操作系统提出了重大挑战。本文以多种自然生物为灵感,提出了一种以可切换润湿性为液滴或气泡驱动核心,以固体状光滑表面为操纵平台的磁致Janus球形机器人,实现了液滴和气泡的双重可编程操纵。此外,Janus机器人在紫外线照射下可以在8分钟内实现从超疏水到超亲水的转变。值得注意的是,Janus机器人在液滴(气泡)的传输速度和载体体积方面表现出了卓越的能力,分别可以达到18 (13)cm s - 1和800(500)µL。该策略为液滴和气泡的自动化操作提供了一种新颖可靠的方法,拓宽了它们的应用范围。
期刊介绍:
Firmly established as a top-tier materials science journal, Advanced Functional Materials reports breakthrough research in all aspects of materials science, including nanotechnology, chemistry, physics, and biology every week.
Advanced Functional Materials is known for its rapid and fair peer review, quality content, and high impact, making it the first choice of the international materials science community.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


