A highly adaptable soft pipeline robot for climbing outside millimeter-sized pipelines
IF 17.1
1区 材料科学
Q1 CHEMISTRY, PHYSICAL
引用次数: 0
Abstract
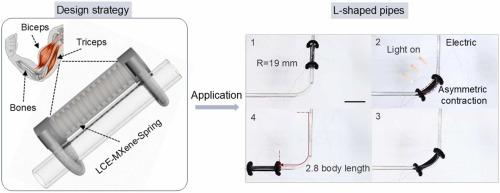
High adaptability to pipelines with small sizes and low bending radius has been a significant problem to solve in pipeline robotics. Here, inspired by the physiological structure and movement mode of human arms, and designs a new type of rigid-flexible hybrid artificial muscle LCE-MXene-Spring (LMS), which exhibits highly integrated multiple degrees of freedom deformation (multi-directional bending, contraction, and elongation) and its excellent driving force. Unlike other LCE artificial muscles, LMS shows considerable driving force under multi-modal drive. LMS is used as a driver unit for pipeline robots, overcoming the problem of the inability to drive loads during liquid crystal elastomer (LCE) recovery. This is the first time that LCE has been introduced into the field of pipeline robots. The robot designed achieves horizontal and vertical climbing movements on a millimeter-sized pipe. Based on the collaborative control strategy of electricity and light, the robot's elongation unit undergoes asymmetric deformation when passing through bends, enabling it to pass through L-shaped pipes with ultra-low bending radii (19 mm), which is the lowest among reported soft pipeline robots. Moreover, it can climb pipes of different geometric shapes, surface media, and materials. The robot is loaded with a micro camera to complete image acquisition tasks while moving, demonstrating its application prospects in pipeline detection.
一种适应性强的柔性管道机器人,可在毫米级管道外攀爬
对小尺寸、低弯曲半径管道的高适应性一直是管道机器人需要解决的重要问题。本文以人体手臂的生理结构和运动方式为灵感,设计了一种新型的刚柔混合人工肌肉LCE-MXene-Spring (LMS),它具有高度集成的多自由度变形(多向弯曲、收缩、伸长)和优异的驱动力。与其他LCE人工肌肉不同,LMS在多模态驱动下表现出相当大的驱动力。LMS被用作管道机器人的驱动单元,克服了液晶弹性体(LCE)回收过程中无法驱动负载的问题。这是LCE首次被引入到管道机器人领域。所设计的机器人可以在一毫米大小的管道上实现水平和垂直的攀爬运动。基于电和光协同控制策略,机器人的延伸单元在通过弯道时发生不对称变形,使其能够通过弯曲半径极小的l型管道(19 mm),这是目前报道的软管道机器人中弯曲半径最小的。此外,它还可以攀爬不同几何形状、表面介质和材料的管道。该机器人装载微型摄像头,在移动中完成图像采集任务,展示了其在管道检测中的应用前景。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Nano Energy
CHEMISTRY, PHYSICAL-NANOSCIENCE & NANOTECHNOLOGY
CiteScore
30.30
自引率
7.40%
发文量
1207
审稿时长
23 days
期刊介绍:
Nano Energy is a multidisciplinary, rapid-publication forum of original peer-reviewed contributions on the science and engineering of nanomaterials and nanodevices used in all forms of energy harvesting, conversion, storage, utilization and policy. Through its mixture of articles, reviews, communications, research news, and information on key developments, Nano Energy provides a comprehensive coverage of this exciting and dynamic field which joins nanoscience and nanotechnology with energy science. The journal is relevant to all those who are interested in nanomaterials solutions to the energy problem.
Nano Energy publishes original experimental and theoretical research on all aspects of energy-related research which utilizes nanomaterials and nanotechnology. Manuscripts of four types are considered: review articles which inform readers of the latest research and advances in energy science; rapid communications which feature exciting research breakthroughs in the field; full-length articles which report comprehensive research developments; and news and opinions which comment on topical issues or express views on the developments in related fields.
文献相关原料
公司名称
产品信息
麦克林
Triethanolamine (TEA)
麦克林
tetrahydrofuran (THF)
麦克林
Triethanolamine
麦克林
Tetrahydrofuran
阿拉丁
Tetraethylorthosilicate
阿拉丁
(3-amino propyl)-triethoxy silane
阿拉丁
1-(3-dimethylaminopropyl)-3-ethylcarbodiimide hydrochloride
阿拉丁
Tetraethylorthosilicate (TEOS)
阿拉丁
1-(3-dimethylaminopropyl)-3-ethylcarbodiimide hydrochloride (EDC·HCl)
Sigma
dipropylamine (DPA)
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


