A stick-slip piezoelectric actuator with large stepping displacement
IF 7.1
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2024-11-24
DOI:10.1016/j.ijmecsci.2024.109850
引用次数: 0
Abstract
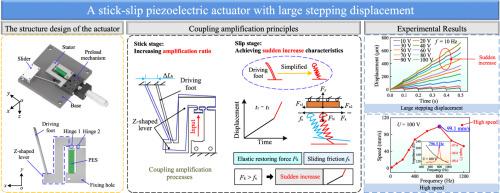
Piezoelectric actuators have gained widespread attention for their quick response, low energy consumption, and resistance to electromagnetic interference. However, current piezoelectric actuators face challenges in achieving large stepping displacement within compact spaces owing to the small output of individual piezoelectric elements. To address this issue, a stick-slip piezoelectric actuator based on the lever and triangular coupling amplification principle is proposed in this study. The improved lever and triangular amplification mechanisms significantly enhance the forward displacement during the stick stage. Owing to the unique slender flexible driving foot design of the triangular amplification section, the coupled triangular amplification mechanism can store elastic potential energy during the stick stage without compromising structural compactness. This energy is then released during the slip stage to counteract the sliding friction, enabling the actuator to achieve a sudden increase in characteristics. The displacement amplification effect of the flexible hinge mechanism is examined through theoretical calculations and simulations. The experimental results confirm that the proposed actuator can achieve large stepping displacement and high stepping performance factors under low-frequency conditions. Specifically, at a voltage of 100 V and frequency of 10 Hz, the stepping displacement and stepping performance factor reached 144 μm and 1.44 μm/V, respectively. Owing to the increased stepping displacement, the actuator achieved a maximum speed of 99.1 mm/s at 800 Hz. These features demonstrate the tremendous potential of the proposed actuator in various applications.
一种具有大步进位移的粘滑式压电驱动器
压电驱动器因其响应快、能耗低、抗电磁干扰等优点而受到广泛关注。然而,由于单个压电元件的输出较小,目前的压电驱动器在紧凑的空间内实现大的步进位移面临挑战。针对这一问题,本文提出了一种基于杠杆和三角耦合放大原理的粘滑压电驱动器。改进后的杠杆和三角放大机构显著提高了粘杆阶段的前向位移。由于三角形放大部分独特的细长柔性驱动脚设计,耦合三角形放大机构可以在不影响结构紧凑性的情况下储存粘接阶段的弹性势能。然后在滑移阶段释放该能量以抵消滑动摩擦,使致动器能够实现特性的突然增加。通过理论计算和仿真验证了柔性铰链机构的位移放大效应。实验结果表明,该驱动器在低频条件下可以实现较大的步进位移和较高的步进性能因子。其中,在100v电压和10hz频率下,步进位移和步进性能因子分别达到144 μm和1.44 μm/V。由于步进位移的增加,致动器在800 Hz时达到了99.1 mm/s的最大速度。这些特点表明了所提出的执行器在各种应用中的巨大潜力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


