{"title":"Enhancement of zebrafish sperm activation through microfluidic mixing induced by aquatic microrobots","authors":"Kai-Hsiang Yang, Dineshkumar Loganathan, Ming-Lung Chen, Vignesh Sahadevan, Chia-Yun Chen, Chia-Yuan Chen","doi":"10.1007/s10404-024-02778-0","DOIUrl":null,"url":null,"abstract":"<div><p>The activation of zebrafish sperm is essential for advancing vertebrate research, including studies in germplasm physiology and cryopreservation. In this study, a magnetic microrobot-based micromixer is developed to maximize zebrafish sperm activation through uniform micromixing and precise hydrodynamic control. Three distinct configurations of the microfluidic channel, labeled Design I, II, and III, are proposed and employed to activate zebrafish sperm cells. These configurations are distinguished by the number of microrobots utilized and their specific placement within the microfluidic channel. The fluid shear rate induced by the microrobot’s rotational motion is quantified to be 0.2 s⁻¹, falling within the lower range conducive to sperm activation. Meanwhile, zebrafish sperm activation percentage is observed to reach 88% within 10 s in an individual experiment. Additionally, the dynamics of sperm motility parameters, including VSL (straight-line velocity), VCL (curvilinear velocity), and LIN (linearity, VSL/VCL), are quantified to verify these results. The LIN value is observed to be 0.91 for Design III at the actuation time period of 10 s, indicating that the activated sperms are highly efficient and progressively motile. This study underscores the efficacy of microrobotic technologies in live cell manipulation, establishing a promising approach for future research.</p></div>","PeriodicalId":706,"journal":{"name":"Microfluidics and Nanofluidics","volume":"29 1","pages":""},"PeriodicalIF":2.5000,"publicationDate":"2024-11-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Microfluidics and Nanofluidics","FirstCategoryId":"5","ListUrlMain":"https://link.springer.com/article/10.1007/s10404-024-02778-0","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"INSTRUMENTS & INSTRUMENTATION","Score":null,"Total":0}
引用次数: 0
Abstract
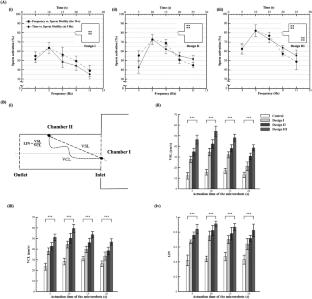
The activation of zebrafish sperm is essential for advancing vertebrate research, including studies in germplasm physiology and cryopreservation. In this study, a magnetic microrobot-based micromixer is developed to maximize zebrafish sperm activation through uniform micromixing and precise hydrodynamic control. Three distinct configurations of the microfluidic channel, labeled Design I, II, and III, are proposed and employed to activate zebrafish sperm cells. These configurations are distinguished by the number of microrobots utilized and their specific placement within the microfluidic channel. The fluid shear rate induced by the microrobot’s rotational motion is quantified to be 0.2 s⁻¹, falling within the lower range conducive to sperm activation. Meanwhile, zebrafish sperm activation percentage is observed to reach 88% within 10 s in an individual experiment. Additionally, the dynamics of sperm motility parameters, including VSL (straight-line velocity), VCL (curvilinear velocity), and LIN (linearity, VSL/VCL), are quantified to verify these results. The LIN value is observed to be 0.91 for Design III at the actuation time period of 10 s, indicating that the activated sperms are highly efficient and progressively motile. This study underscores the efficacy of microrobotic technologies in live cell manipulation, establishing a promising approach for future research.
期刊介绍:
Microfluidics and Nanofluidics is an international peer-reviewed journal that aims to publish papers in all aspects of microfluidics, nanofluidics and lab-on-a-chip science and technology. The objectives of the journal are to (1) provide an overview of the current state of the research and development in microfluidics, nanofluidics and lab-on-a-chip devices, (2) improve the fundamental understanding of microfluidic and nanofluidic phenomena, and (3) discuss applications of microfluidics, nanofluidics and lab-on-a-chip devices. Topics covered in this journal include:
1.000 Fundamental principles of micro- and nanoscale phenomena like,
flow, mass transport and reactions
3.000 Theoretical models and numerical simulation with experimental and/or analytical proof
4.000 Novel measurement & characterization technologies
5.000 Devices (actuators and sensors)
6.000 New unit-operations for dedicated microfluidic platforms
7.000 Lab-on-a-Chip applications
8.000 Microfabrication technologies and materials
Please note, Microfluidics and Nanofluidics does not publish manuscripts studying pure microscale heat transfer since there are many journals that cover this field of research (Journal of Heat Transfer, Journal of Heat and Mass Transfer, Journal of Heat and Fluid Flow, etc.).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


