V-FCW: Vector-based forward collision warning algorithm for curved road conflicts using V2X networks
IF 5.7
1区 工程技术
Q1 ERGONOMICS
引用次数: 0
Abstract
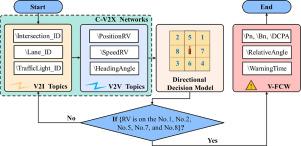
The implementation of advanced driver assistance systems (ADAS) has significantly impacted the prevention of traffic accidents, particularly through the forward collision warning (FCW) algorithm. Nevertheless, traffic conflicts on traffic routes remain a significant issue, since most FCW algorithms cannot accurately determine the distance between the host vehicle (HV) and remote vehicle (RV) on curved roads. Hence, this study proposes a vector-based FCW (V-FCW) algorithm to address the issue of false warnings on unconventional road sections. The V-FCW algorithm employs vector relationships to estimate the poses of HV and RV at the current and next moments, thereby effectively calculating the relative angles. Firstly, the HV and RV transmit their position vector, velocity vector, and heading angle in real time via the vehicle-to-vehicle (V2V) communication technique. Subsequently, the localization of lanes is conducted through the vehicle-to-infrastructure (V2I) communication technique, with the assistance of roadside unit (RSU)-based local maps. Finally, a V-FCW algorithm was implemented on the Simcenter Prescan simulation platform and a cellular vehicle-to-everything (C-V2X, i.e., the combination of V2V and V2I) communication platform. The simulation results demonstrate that the proposed V-FCW algorithm can accurately identify and warn dangerous vehicles on both straight and curved roads. Moreover, the experimental results obtained from the hardware-in-the-loop approach illustrate the efficacy of the proposed V-FCW algorithm in accurately forecasting four warning levels on both straight and curved roads. Consequently, this study yields a significant contribution to the field of vehicle-road cooperation in C-V2X-enable intelligent driving.
V-FCW:利用 V2X 网络针对弯道冲突的基于向量的前向碰撞预警算法。
高级驾驶员辅助系统(ADAS)的实施对预防交通事故产生了重大影响,特别是通过前撞预警(FCW)算法。然而,交通路线上的交通冲突仍然是一个重要问题,因为大多数 FCW 算法无法在弯曲的道路上准确确定主机车辆(HV)和远程车辆(RV)之间的距离。因此,本研究提出了一种基于矢量的 FCW(V-FCW)算法,以解决非常规路段上的误报问题。V-FCW 算法利用矢量关系来估计 HV 和 RV 在当前和下一时刻的姿态,从而有效计算相对角度。首先,HV 和 RV 通过车对车(V2V)通信技术实时传输其位置矢量、速度矢量和航向角。随后,通过车对基础设施(V2I)通信技术,在基于路边装置(RSU)的本地地图的辅助下,进行车道定位。最后,在 Simcenter Prescan 仿真平台和蜂窝式车对物(C-V2X,即 V2V 和 V2I 的结合)通信平台上实现了 V-FCW 算法。仿真结果表明,所提出的 V-FCW 算法可以在直线和曲线道路上准确识别和警告危险车辆。此外,通过硬件在环方法获得的实验结果表明,所提出的 V-FCW 算法能在直线和曲线道路上准确预测四个警告级别。因此,本研究为 C-V2X 智能驾驶中的车路协同领域做出了重要贡献。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Accident; analysis and prevention
Multiple-
CiteScore
11.90
自引率
16.90%
发文量
264
审稿时长
48 days
期刊介绍:
Accident Analysis & Prevention provides wide coverage of the general areas relating to accidental injury and damage, including the pre-injury and immediate post-injury phases. Published papers deal with medical, legal, economic, educational, behavioral, theoretical or empirical aspects of transportation accidents, as well as with accidents at other sites. Selected topics within the scope of the Journal may include: studies of human, environmental and vehicular factors influencing the occurrence, type and severity of accidents and injury; the design, implementation and evaluation of countermeasures; biomechanics of impact and human tolerance limits to injury; modelling and statistical analysis of accident data; policy, planning and decision-making in safety.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


