State Observer-Based Iterative Learning Control Design for Discrete Systems Using the Heavy Ball Method
IF 0.6
4区 计算机科学
Q4 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
Abstract
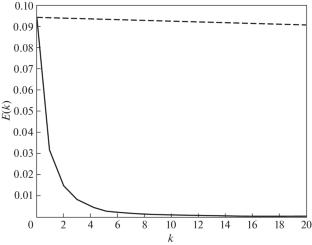
The paper considers a state observer-based iterative learning control design problem for discrete linear systems. To accelerate the convergence of the learning error, a combination of the heavy ball method from optimization theory and the vector Lyapunov function method for a class of two-dimensional systems known as repetitive processes is used to develop a new design. A supporting numerical example is given, including a comparison with an existing design.
基于状态观测器的离散系统迭代学习控制设计(使用重球法
本文探讨了离散线性系统基于状态观测器的迭代学习控制设计问题。为了加快学习误差的收敛速度,本文结合优化理论中的重球法和针对一类称为重复过程的二维系统的矢量 Lyapunov 函数法,开发了一种新的设计方法。文中给出了一个辅助数值示例,包括与现有设计的比较。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Automation and Remote Control
工程技术-仪器仪表
CiteScore
1.70
自引率
28.60%
发文量
90
审稿时长
3-8 weeks
期刊介绍:
Automation and Remote Control is one of the first journals on control theory. The scope of the journal is control theory problems and applications. The journal publishes reviews, original articles, and short communications (deterministic, stochastic, adaptive, and robust formulations) and its applications (computer control, components and instruments, process control, social and economy control, etc.).
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


