Ximing Zhao, Yilin Su, Qingzhang Xu, Haohang Liu, Rui Shi, Meiyang Zhang, Xuyan Hou, Youyu Wang
{"title":"Flexible Continuum Robot with Variable Stiffness, Shape-Aware, and Self-Heating Capabilities","authors":"Ximing Zhao, Yilin Su, Qingzhang Xu, Haohang Liu, Rui Shi, Meiyang Zhang, Xuyan Hou, Youyu Wang","doi":"10.1002/aisy.202400166","DOIUrl":null,"url":null,"abstract":"<p>Conventional continuum robots have outstanding flexibility and dexterity. However, when the robot needs to interact with the environment, the softness may affect the performance of the robot. Especially in transport tasks, the softness of continuum robots can lead to handling failures and drastic drops in precision. The variable stiffness continuum robot combines the advantages of flexibility and rigidity, which is conducive to expanding the application scenarios of flexible continuum robots. This article proposes a flexible continuum robot that simultaneously realizes variable stiffness, shape-aware, and self-heating functions using liquid metal. The low-temperature phase transition property of liquid metal is utilized to realize the variable stiffness function; the overall stiffness of the robot can reach the range of 18.5–183 N m<sup>−1</sup>, which can realize a tenfold stiffness gain. The conductivity of liquid metal is utilized to develop the shape-aware function, and the monitoring accuracy is within 5%. At the same time, this article utilizes the liquid metal's resistive thermal effect to realize heating function, so that the robot no longer needs heating systems such as heating wires and can realize the phase transition by energizing itself. Based on this design, the robot arm can realize the transition between maximum and minimum stiffness within 240 s.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 11","pages":""},"PeriodicalIF":6.8000,"publicationDate":"2024-10-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400166","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/aisy.202400166","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
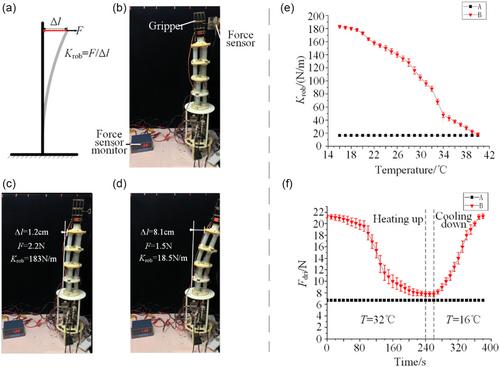
Conventional continuum robots have outstanding flexibility and dexterity. However, when the robot needs to interact with the environment, the softness may affect the performance of the robot. Especially in transport tasks, the softness of continuum robots can lead to handling failures and drastic drops in precision. The variable stiffness continuum robot combines the advantages of flexibility and rigidity, which is conducive to expanding the application scenarios of flexible continuum robots. This article proposes a flexible continuum robot that simultaneously realizes variable stiffness, shape-aware, and self-heating functions using liquid metal. The low-temperature phase transition property of liquid metal is utilized to realize the variable stiffness function; the overall stiffness of the robot can reach the range of 18.5–183 N m−1, which can realize a tenfold stiffness gain. The conductivity of liquid metal is utilized to develop the shape-aware function, and the monitoring accuracy is within 5%. At the same time, this article utilizes the liquid metal's resistive thermal effect to realize heating function, so that the robot no longer needs heating systems such as heating wires and can realize the phase transition by energizing itself. Based on this design, the robot arm can realize the transition between maximum and minimum stiffness within 240 s.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


