Junmo Yang, Youngrae Kim, Jisu Kim, Seunghyun Lim, Jingon Yoon, Dongwon Yun
{"title":"Development of Flexure-Based Supernumerary Robotic Finger for Hand Function Augmentation","authors":"Junmo Yang, Youngrae Kim, Jisu Kim, Seunghyun Lim, Jingon Yoon, Dongwon Yun","doi":"10.1002/aisy.202400131","DOIUrl":null,"url":null,"abstract":"<p>This study introduces a flexure-based supernumerary robotic finger (FBSF) inspired by the proportions of the human thumb, aiming to overcome existing limitations in robotic finger design. In pursuit of seamless cooperation with the user's hand, human finger proportions are replicated. Finite element analysis of all five fingers indicates that the thumb-mimicking configuration offers the largest workspace and bending angle. The FBSF, featuring a polycarbonate paired crossed flexural hinge structure and high impact polystyrene links, closely mirrors the human thumb. Weighing 59 g (main body) and 170 g (control box), the FBSF enables user-driven control and decoupled actuation based on user intent, utilizing the electromyographic signal of the extensor carpi ulnaris via isometric contractions. An experimental protocol, including task blocks (releasing, clenching), confirms the FBSF's responsiveness to user intentions. When utilizing FBSF, it has been verified using a motion capture camera system that it is possible to extend the existing hand workspace by approximately 29.72%. Performance tests demonstrate the FBSF's capability to grasp various objects and assist in tasks, with a maximum load-bearing capacity of 2.6 kg experimentally verified. This study demonstrates the potential of the developed FBSF to augment hand functionality in diverse applications.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 11","pages":""},"PeriodicalIF":6.8000,"publicationDate":"2024-06-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400131","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/aisy.202400131","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
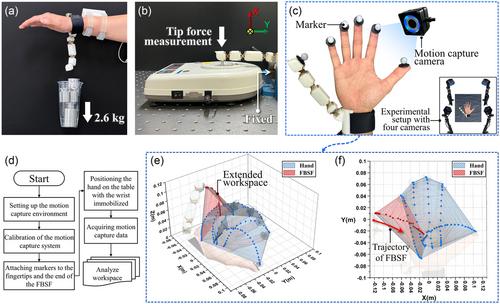
This study introduces a flexure-based supernumerary robotic finger (FBSF) inspired by the proportions of the human thumb, aiming to overcome existing limitations in robotic finger design. In pursuit of seamless cooperation with the user's hand, human finger proportions are replicated. Finite element analysis of all five fingers indicates that the thumb-mimicking configuration offers the largest workspace and bending angle. The FBSF, featuring a polycarbonate paired crossed flexural hinge structure and high impact polystyrene links, closely mirrors the human thumb. Weighing 59 g (main body) and 170 g (control box), the FBSF enables user-driven control and decoupled actuation based on user intent, utilizing the electromyographic signal of the extensor carpi ulnaris via isometric contractions. An experimental protocol, including task blocks (releasing, clenching), confirms the FBSF's responsiveness to user intentions. When utilizing FBSF, it has been verified using a motion capture camera system that it is possible to extend the existing hand workspace by approximately 29.72%. Performance tests demonstrate the FBSF's capability to grasp various objects and assist in tasks, with a maximum load-bearing capacity of 2.6 kg experimentally verified. This study demonstrates the potential of the developed FBSF to augment hand functionality in diverse applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


