Generative models for grid-based and image-based pathfinding
IF 4.6
2区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
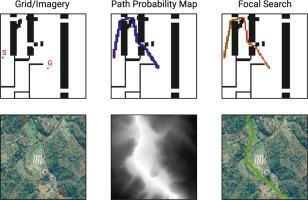
Pathfinding is a challenging problem which generally asks to find a sequence of valid moves for an agent provided with a representation of the environment, i.e. a map, in which it operates. In this work, we consider pathfinding on binary grids and on image representations of the digital elevation models. In the former case, the transition costs are known, while in latter scenario, they are not. A widespread method to solve the first problem is to utilize a search algorithm that systematically explores the search space to obtain a solution. Ideally, the search should also be complemented with an informative heuristic to focus on the goal and prune the unpromising regions of the search space, thus decreasing the number of search iterations. Unfortunately, the widespread heuristic functions for grid-based pathfinding, such as Manhattan distance or Chebyshev distance, do not take the obstacles into account and in obstacle-rich environments demonstrate inefficient performance. As for pathfinding with image inputs, the heuristic search cannot be applied straightforwardly as the transition costs, i.e. the costs of moving from one pixel to the other, are not known. To tackle both challenges, we suggest utilizing modern deep neural networks to infer the instance-dependent heuristic functions at the pre-processing step and further use them for pathfinding with standard heuristic search algorithms. The principal heuristic function that we suggest learning is the path probability, which indicates how likely the grid cell (pixel) is lying on the shortest path (for binary grids with known transition costs, we also suggest another variant of the heuristic function that can speed up the search). Learning is performed in a supervised fashion (while we have also explored the possibilities of end-to-end learning that includes a planner in the learning pipeline). At the test time, path probability is used as the secondary heuristic for the Focal Search, a specific heuristic search algorithm that provides the theoretical guarantees on the cost bound of the resultant solution. Empirically, we show that the suggested approach significantly outperforms state-of-the-art competitors in a variety of different tasks (including out-of-the distribution instances).
基于网格和图像的寻路生成模型
寻路是一个极具挑战性的问题,通常要求为一个代理找到一连串有效的移动,而代理所处的环境就是地图。在这项工作中,我们考虑在二进制网格和数字高程模型的图像表示上进行寻路。在前一种情况下,过渡成本是已知的,而在后一种情况下,过渡成本是未知的。解决第一个问题的普遍方法是利用一种搜索算法,系统地探索搜索空间以获得解决方案。理想情况下,搜索还应辅之以信息启发式,以聚焦目标并修剪搜索空间中不具前景的区域,从而减少搜索迭代次数。遗憾的是,用于网格寻路的常用启发式函数,如曼哈顿距离或切比雪夫距离,并没有将障碍物考虑在内,在障碍物密集的环境中表现出低效的性能。至于利用图像输入寻路,由于过渡成本(即从一个像素移动到另一个像素的成本)未知,启发式搜索无法直接应用。为了解决这两个难题,我们建议在预处理步骤中利用现代深度神经网络来推断与实例相关的启发式函数,并进一步将其用于标准启发式搜索算法的寻路。我们建议学习的主要启发式函数是路径概率,它表示网格单元(像素)位于最短路径上的可能性有多大(对于已知过渡成本的二进制网格,我们还建议使用另一种可加快搜索速度的启发式函数变体)。学习以有监督的方式进行(同时我们也探索了端到端学习的可能性,即在学习管道中加入规划器)。在测试时,路径概率被用作焦点搜索(Focal Search)的辅助启发式,这是一种特定的启发式搜索算法,可为最终解决方案的成本边界提供理论保证。经验表明,在各种不同的任务(包括分布外实例)中,所建议的方法明显优于最先进的竞争对手。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Artificial Intelligence
工程技术-计算机:人工智能
CiteScore
11.20
自引率
1.40%
发文量
118
审稿时长
8 months
期刊介绍:
The Journal of Artificial Intelligence (AIJ) welcomes papers covering a broad spectrum of AI topics, including cognition, automated reasoning, computer vision, machine learning, and more. Papers should demonstrate advancements in AI and propose innovative approaches to AI problems. Additionally, the journal accepts papers describing AI applications, focusing on how new methods enhance performance rather than reiterating conventional approaches. In addition to regular papers, AIJ also accepts Research Notes, Research Field Reviews, Position Papers, Book Reviews, and summary papers on AI challenges and competitions.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


