{"title":"DSA-Former: A Network of Hybrid Variable Structures for Liver and Liver Tumour Segmentation","authors":"Jun Qin, Huizhen Luo, Fei He, Guihe Qin","doi":"10.1002/rcs.70004","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>Accurately annotated CT images of liver tumours can effectively assist doctors in diagnosing and treating liver cancer. However, due to the relatively low density of the liver, its tumours, and surrounding tissues, as well as the existence of multi-scale problems, accurate automatic segmentation still faces challenges.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>We propose a segmentation network DSA-Former that combines convolutional kernels and attention. By combining the morphological and edge features of liver tumour images, capture global/local features and key inter-layer information, and integrate attention mechanisms obtaining detailed information to improve segmentation accuracy.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>Compared to other methods, our approach demonstrates significant advantages in evaluation metrics such as the Dice coefficient, IOU, VOE, and HD95. Specifically, we achieve Dice coefficients of 96.8% for liver segmentation and 72.2% for liver tumour segmentation.</p>\n </section>\n \n <section>\n \n <h3> Conclusion</h3>\n \n <p>Our method offers enhanced precision in segmenting liver and liver tumour images, laying a robust foundation for liver cancer diagnosis and treatment.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 6","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2024-11-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.70004","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.70004","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background
Accurately annotated CT images of liver tumours can effectively assist doctors in diagnosing and treating liver cancer. However, due to the relatively low density of the liver, its tumours, and surrounding tissues, as well as the existence of multi-scale problems, accurate automatic segmentation still faces challenges.
Methods
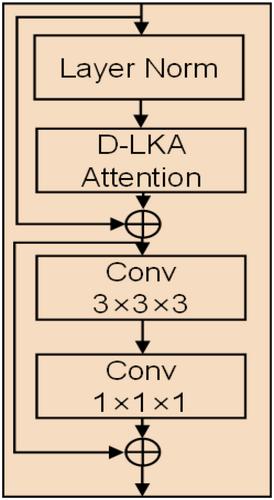
We propose a segmentation network DSA-Former that combines convolutional kernels and attention. By combining the morphological and edge features of liver tumour images, capture global/local features and key inter-layer information, and integrate attention mechanisms obtaining detailed information to improve segmentation accuracy.
Results
Compared to other methods, our approach demonstrates significant advantages in evaluation metrics such as the Dice coefficient, IOU, VOE, and HD95. Specifically, we achieve Dice coefficients of 96.8% for liver segmentation and 72.2% for liver tumour segmentation.
Conclusion
Our method offers enhanced precision in segmenting liver and liver tumour images, laying a robust foundation for liver cancer diagnosis and treatment.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


