Drop-on-demand 3D printing of programable magnetic composites for soft robotics
IF 4.7
Q2 ENGINEERING, MANUFACTURING
引用次数: 0
Abstract
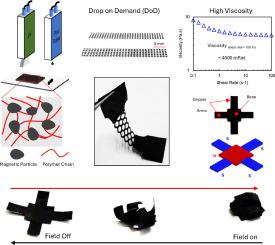
Soft robotics have become increasingly popular as a versatile alternative to traditional robotics. Magnetic composite materials, which respond to external magnetic fields, have attracted significant interest in this field due to their programmable two-way actuation and shape-morphing capabilities. Additive manufacturing (AM)/3D printing allows for the incorporation of different functional composite materials to create active components for soft robotics. However, current AM methods have limitations, especially when it comes to printing smart composite materials with high functional material content. This is a key requirement for enhancing responsiveness to external stimuli. Commonly used AM methods for smart magnetic composites, such as direct ink writing (DIW), confront challenges in achieving discontinuous printing, and enabling multi-material control at the voxel level, while some AM techniques are not suitable for producing composite materials. To address these limitations, we employed high-viscosity drop-on-demand (DoD) jetting and developed programmable magnetic composites filled with micron-sized hard magnetic particles. This method bridges the gap between conventional ink-jetting and DIW, which require printing inks with viscosities at opposite ends of the spectrum. This high-viscosity DoD jetting enables continuous, discontinuous, and non-contact printing, making it a versatile and effective method for 3D printing functional magnetic composites even with micron-sized fillers. Furthermore, we demonstrated stable magnetic domain programming and two-way shape-morphing actuations of printed structures for soft robotics. In summary, our work highlights high-viscosity DoD jetting as a promising method for printing functional magnetic composites and other similar materials for a wide range of applications.
用于软机器人的可编程磁性复合材料的按需滴落三维打印技术
作为传统机器人技术的多功能替代品,软机器人技术越来越受欢迎。磁性复合材料可对外部磁场做出反应,由于其可编程的双向驱动和形状变形能力,在这一领域引起了极大的兴趣。增材制造(AM)/三维打印技术可以将不同的功能复合材料结合在一起,为软体机器人制造有源元件。然而,目前的增材制造方法存在局限性,尤其是在打印高功能材料含量的智能复合材料时。这是提高对外部刺激响应能力的关键要求。用于智能磁性复合材料的常用 AM 方法(如直接墨水写入(DIW))在实现不连续打印和在体素级实现多材料控制方面面临挑战,而一些 AM 技术则不适合生产复合材料。为了解决这些限制,我们采用了高粘度按需滴墨(DoD)喷射技术,并开发出了填充微米级硬磁性颗粒的可编程磁性复合材料。这种方法弥补了传统喷墨和按需滴墨之间的差距,因为传统喷墨和按需滴墨需要打印粘度处于光谱两端的墨水。这种高粘度 DoD 喷射可实现连续、不连续和非接触式打印,使其成为一种通用而有效的 3D 打印功能性磁性复合材料的方法,即使使用微米级填料也不例外。此外,我们还展示了用于软机器人的稳定磁域编程和打印结构的双向形状变形执行。总之,我们的工作凸显了高粘度 DoD 喷射是打印功能性磁性复合材料和其他类似材料的一种前景广阔的方法。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Additive manufacturing letters
Materials Science (General), Industrial and Manufacturing Engineering, Mechanics of Materials
CiteScore
3.70
自引率
0.00%
发文量
0
审稿时长
37 days
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


