Trapping micro-swimmers over a cavity in an inertial micro-channel
IF 7.1
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2024-10-28
DOI:10.1016/j.ijmecsci.2024.109796
引用次数: 0
Abstract
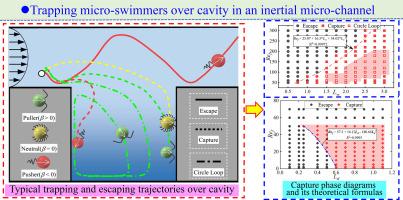
Based on the lattice Boltzmann method and the squirmer self-propulsion model, this paper focuses on the motion characteristics of three types of swimmers (neutral swimmer, puller, pusher) over a cavity in an inertial micro-channel. The effects of fluid inertia (Ref) and channel-cavity structural parameters (Ld, Lw) on the capture and separation of micro-swimmers are analysed. The results indicate that there are five motion modes of swimmer under low Reynolds number. As fluid inertia increases, three new motion modes emerge. Neutral swimmer is captured at low Ref, while the puller and pusher are captured at high Ref. Under a suitable cavity aspect ratio, the puller also exhibits an additional new trapping mode known as the circle loop trapping. Moreover, the pusher with large activity will behave differently at various Reynolds numbers. Ultimately, through data and theoretical analysis, theoretical formulas are developed to reflect the effect of cavity size and Reynolds number on the capture and separation performance through the phase diagram. By integrating the examination of diverse trapping behaviours of microwimmers within complex microchannel structures, this study significantly enhances our understanding of the complex motion of microwimmers in intricate flow environments, and facilitates the manipulation and control of manmade microwimmers.
在惯性微通道的空腔上捕捉微游子
本文基于晶格玻尔兹曼法和微型游泳器自推进模型,重点研究了三种游泳器(中性游泳器、拉力器和推力器)在惯性微通道空腔上的运动特性。分析了流体惯性(Ref)和通道-空腔结构参数(Ld、Lw)对微泳体捕捉和分离的影响。结果表明,在低雷诺数条件下,游泳者有五种运动模式。随着流体惯性的增加,出现了三种新的运动模式。低雷诺数时捕获的是中性游动体,而高雷诺数时捕获的是拉动体和推动体。在合适的空腔长宽比下,拉杆还表现出一种新的捕获模式,即圆环捕获。此外,在不同的雷诺数下,具有较大活性的推杆也会有不同的表现。通过数据和理论分析,最终得出了理论公式,通过相图反映出空腔尺寸和雷诺数对捕集和分离性能的影响。通过对微波分子在复杂微通道结构中的各种捕集行为进行综合研究,这项研究极大地增强了我们对微波分子在复杂流动环境中的复杂运动的理解,并促进了对人造微波分子的操纵和控制。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


