Hopping potential wells and gait switching in a fish-like robot with a bistable tail
IF 4.3
3区 工程技术
Q2 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
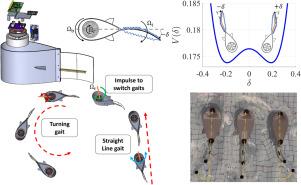
Fish outperform current underwater robots in speed, agility, and efficiency of locomotion, in part due to their flexible appendages that are capable of rich combinations of modes of motion. In fish-like robots, actuating many different modes of oscillation of tails or fins can become a challenge. This paper presents a highly underactuated (with a single actuator) fish-like robot with a bistable tail that features a double-well elastic potential. Oscillations of such a tail depend on the frequency and amplitude of excitation, and tuning the frequency–amplitude can produce controllable oscillations in different modes leading to different gaits of the robot. This robot design is inspired by recent work on underactuated flexible swimming robots driven by a single rotor. The oscillations of the rotor can propel and steer the robot, but saturation of the rotor makes performing long turns challenging. This paper demonstrates that by adding geometric bistability to the flexible tail, turns can be performed by controllably exciting single-well oscillations in the tail, while exciting double-well oscillations of the tail produces average straight-line motion. The findings of this paper go beyond the application to a narrow class of fish-like robots. More broadly we have demonstrated the use of periodic excitation to produce bistable response that generate different gaits including a steering gait. The mechanics demonstrated here show the feasibility of applications to other mobile soft robots.
双稳态尾巴鱼形机器人的跳跃势阱和步态切换
鱼类在速度、灵活性和运动效率方面都优于目前的水下机器人,部分原因是它们灵活的附肢能够实现丰富的运动模式组合。在类鱼机器人中,驱动尾巴或鳍的多种不同摆动模式是一项挑战。本文介绍了一种具有双稳态尾部的高度欠驱动(单驱动)仿鱼机器人,其尾部具有双井弹性势能。这种鱼尾的振荡取决于激励的频率和振幅,调整频率和振幅可以产生不同模式的可控振荡,从而导致机器人的不同步态。这种机器人的设计灵感来自于最近关于由单个转子驱动的欠驱动柔性游泳机器人的研究。转子的振荡可以推动机器人并使其转向,但转子的饱和使得进行长距离转弯具有挑战性。本文证明,通过在柔性尾部添加几何双稳态,可以通过可控地激励尾部的单孔振荡来实现转弯,而激励尾部的双孔振荡则可以产生平均直线运动。本文的研究成果不仅适用于狭义的鱼形机器人。更广泛地说,我们已经展示了利用周期性激励产生双稳态响应,从而产生包括转向步态在内的不同步态。本文所展示的力学原理表明了应用于其他移动软体机器人的可行性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Extreme Mechanics Letters
Engineering-Mechanics of Materials
CiteScore
9.20
自引率
4.30%
发文量
179
审稿时长
45 days
期刊介绍:
Extreme Mechanics Letters (EML) enables rapid communication of research that highlights the role of mechanics in multi-disciplinary areas across materials science, physics, chemistry, biology, medicine and engineering. Emphasis is on the impact, depth and originality of new concepts, methods and observations at the forefront of applied sciences.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


