Biomimetic soft actuator: Rapid response to multiple stimuli with programmable control
IF 10.5
2区 材料科学
Q1 CHEMISTRY, PHYSICAL
引用次数: 0
Abstract
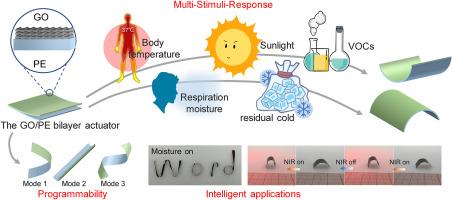
Stimuli-responsive soft actuators have attracted increasing attention in multiple fields since they exhibit unique advantages in safe interaction with humans and adaptability to dynamic environments. However, the study of untethered stimuli-responsive soft actuators has been limited by the slow response speed, irreversible deformations or inability in responding to multiple stimuli. Taking inspiration from the growth process of lotus leaves, we propose a novel design for an untethered soft actuator comprising graphene oxide (GO) and polyethylene (PE), which shows sensitive response to multiple stimuli, including moisture, light, heating, cooling, and elective volatile organic compounds (VOCs), and exhibits significant deformation at a rapid rate (up to 90.5°/s). The high sensitivity of the actuators enables them to be powered by the neglected energy in daily life instead of requiring specialized energy sources, paving the way for the green and sustainable development in soft robotics. In addition, the bending modes and bending degrees of actuators can be programmed to meet the personalized needs of complex three-dimensional structures. Based on GO/PE actuators, a variety of multi-stimuli-responsive intelligent devices have been developed to demonstrate their application potential in arts, bionics, soft robotics and wearable devices, including interesting WordArt, Chinese paper-cut art pieces, artificial iris, soft crawling robots and a smart cloth unit with adjustable breathability.
仿生软致动器:通过可编程控制对多种刺激做出快速反应
刺激响应式软致动器在与人类安全互动和适应动态环境方面具有独特优势,因此在多个领域受到越来越多的关注。然而,由于反应速度缓慢、变形不可逆或无法对多种刺激做出响应,对无系绳刺激响应软致动器的研究一直受到限制。我们从荷叶的生长过程中汲取灵感,提出了一种由氧化石墨烯(GO)和聚乙烯(PE)组成的无系链软致动器的新设计,该致动器对湿度、光、加热、冷却和可选挥发性有机化合物(VOCs)等多种刺激具有灵敏的响应,并能以快速的速度(高达 90.5°/s)表现出显著的形变。致动器的高灵敏度使其能够利用日常生活中被忽视的能源,而不需要专门的能源,为软机器人技术的绿色和可持续发展铺平了道路。此外,致动器的弯曲模式和弯曲度可以通过编程实现,以满足复杂三维结构的个性化需求。基于 GO/PE 执行器,我们开发了多种多刺激响应智能装置,展示了它们在艺术、仿生学、软体机器人和可穿戴设备方面的应用潜力,包括有趣的文字艺术、中国剪纸艺术作品、人造虹膜、软体爬行机器人和可调节透气性的智能布料装置。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Carbon
工程技术-材料科学:综合
CiteScore
20.80
自引率
7.30%
发文量
0
审稿时长
23 days
期刊介绍:
The journal Carbon is an international multidisciplinary forum for communicating scientific advances in the field of carbon materials. It reports new findings related to the formation, structure, properties, behaviors, and technological applications of carbons. Carbons are a broad class of ordered or disordered solid phases composed primarily of elemental carbon, including but not limited to carbon black, carbon fibers and filaments, carbon nanotubes, diamond and diamond-like carbon, fullerenes, glassy carbon, graphite, graphene, graphene-oxide, porous carbons, pyrolytic carbon, and other sp2 and non-sp2 hybridized carbon systems. Carbon is the companion title to the open access journal Carbon Trends. Relevant application areas for carbon materials include biology and medicine, catalysis, electronic, optoelectronic, spintronic, high-frequency, and photonic devices, energy storage and conversion systems, environmental applications and water treatment, smart materials and systems, and structural and thermal applications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


