{"title":"Physio-avatar EB: aftereffects in error learning with EMG manipulation of first-person avatar experience.","authors":"Tetsuya Ando, Kazuhiro Matsui, Yuto Okamoto, Keita Atsuumi, Kazuhiro Taniguchi, Hiroaki Hirai, Atsushi Nishikawa","doi":"10.3389/fbioe.2024.1421765","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Many studies have investigated the manipulation of a virtual upper arm using electromyogram (EMG); however, these studies primarily used a machine learning model or trigger control for this purpose. Furthermore, most of them could only display the constant motion of the virtual arm because the motion to be displayed was selected by pattern recognition or trigger control. In addition, these studies did not examine changes in the electromyographic signals after experiencing the virtual arm. By contrast, we propose a real-time, continuous, learning-free avatar that manipulates the virtual arm with electromyogram signals or physio-avatar EMG biofeedback (EB). The goal of the physio-avatar EB system is to induce physiological changes through experiential interactions.</p><p><strong>Methods: </strong>We explored the possibility of changing motor control strategies by applying the system to healthy individuals as a case study. An intervention method that provided an experience of a body different from one's own was conducted on seven participants using a time-invariant calculation algorithm to determine the joint angles of the avatar. Control strategies for an indicator of the equilibrium point in the baseline and adaptation phases were determined to evaluate the physio-avatar EB intervention effect. The similarity of these BL and adaptation control strategies compared to those used during the washout period was assessed using the coefficient of determination. The accuracy and reliability of the virtual reality (VR) system were evaluated by comparison with existing studies and the required specs.</p><p><strong>Results and discussion: </strong>Changes in motor control strategies due to the physio-avatar EB system were observed in four experiments, where the participants gradually returned to their pre-intervention control strategies. This result can be attributed to the aftereffects caused by error learning. This implies that the developed system influenced their motor control strategies. The number of EMG acquisition bits was 16 bits, and the sampling rate was 1,000 Hz. The refresh rate of the head-mounted display was 90 Hz, and its resolution was <math><mrow><mn>1440</mn> <mo>×</mo> <mn>1600</mn></mrow> </math> for a single eye. Additionally, the simulation frame rate was 30 FPS. These values were adequate compared to existing studies and required specs. The essential contribution of this study is the development of an avatar that is controlled by a different method than has been used in previous studies and the demonstration of changes in a subject's muscle activity after they experience an avatar. In the future, the clinical efficacy of the proposed system will be evaluated with actual patients.</p>","PeriodicalId":12444,"journal":{"name":"Frontiers in Bioengineering and Biotechnology","volume":"12 ","pages":"1421765"},"PeriodicalIF":4.8000,"publicationDate":"2024-10-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11503014/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Bioengineering and Biotechnology","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3389/fbioe.2024.1421765","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q1","JCRName":"BIOTECHNOLOGY & APPLIED MICROBIOLOGY","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: Many studies have investigated the manipulation of a virtual upper arm using electromyogram (EMG); however, these studies primarily used a machine learning model or trigger control for this purpose. Furthermore, most of them could only display the constant motion of the virtual arm because the motion to be displayed was selected by pattern recognition or trigger control. In addition, these studies did not examine changes in the electromyographic signals after experiencing the virtual arm. By contrast, we propose a real-time, continuous, learning-free avatar that manipulates the virtual arm with electromyogram signals or physio-avatar EMG biofeedback (EB). The goal of the physio-avatar EB system is to induce physiological changes through experiential interactions.
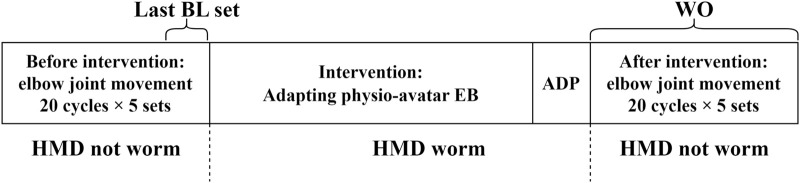
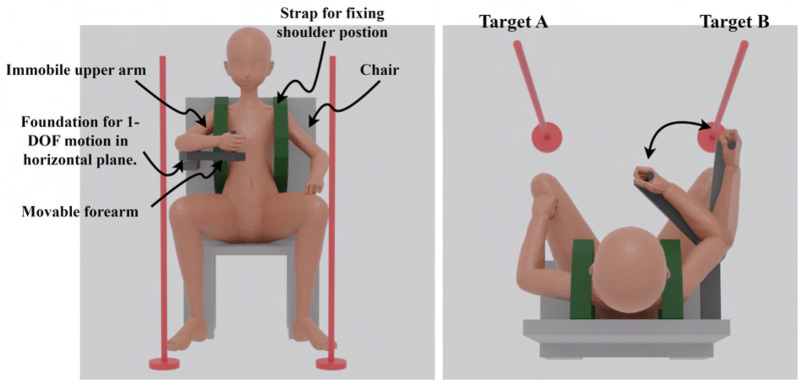
Methods: We explored the possibility of changing motor control strategies by applying the system to healthy individuals as a case study. An intervention method that provided an experience of a body different from one's own was conducted on seven participants using a time-invariant calculation algorithm to determine the joint angles of the avatar. Control strategies for an indicator of the equilibrium point in the baseline and adaptation phases were determined to evaluate the physio-avatar EB intervention effect. The similarity of these BL and adaptation control strategies compared to those used during the washout period was assessed using the coefficient of determination. The accuracy and reliability of the virtual reality (VR) system were evaluated by comparison with existing studies and the required specs.
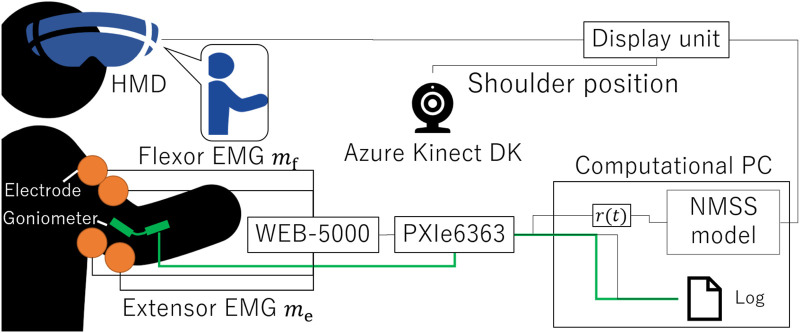
Results and discussion: Changes in motor control strategies due to the physio-avatar EB system were observed in four experiments, where the participants gradually returned to their pre-intervention control strategies. This result can be attributed to the aftereffects caused by error learning. This implies that the developed system influenced their motor control strategies. The number of EMG acquisition bits was 16 bits, and the sampling rate was 1,000 Hz. The refresh rate of the head-mounted display was 90 Hz, and its resolution was for a single eye. Additionally, the simulation frame rate was 30 FPS. These values were adequate compared to existing studies and required specs. The essential contribution of this study is the development of an avatar that is controlled by a different method than has been used in previous studies and the demonstration of changes in a subject's muscle activity after they experience an avatar. In the future, the clinical efficacy of the proposed system will be evaluated with actual patients.
期刊介绍:
The translation of new discoveries in medicine to clinical routine has never been easy. During the second half of the last century, thanks to the progress in chemistry, biochemistry and pharmacology, we have seen the development and the application of a large number of drugs and devices aimed at the treatment of symptoms, blocking unwanted pathways and, in the case of infectious diseases, fighting the micro-organisms responsible. However, we are facing, today, a dramatic change in the therapeutic approach to pathologies and diseases. Indeed, the challenge of the present and the next decade is to fully restore the physiological status of the diseased organism and to completely regenerate tissue and organs when they are so seriously affected that treatments cannot be limited to the repression of symptoms or to the repair of damage. This is being made possible thanks to the major developments made in basic cell and molecular biology, including stem cell science, growth factor delivery, gene isolation and transfection, the advances in bioengineering and nanotechnology, including development of new biomaterials, biofabrication technologies and use of bioreactors, and the big improvements in diagnostic tools and imaging of cells, tissues and organs.
In today`s world, an enhancement of communication between multidisciplinary experts, together with the promotion of joint projects and close collaborations among scientists, engineers, industry people, regulatory agencies and physicians are absolute requirements for the success of any attempt to develop and clinically apply a new biological therapy or an innovative device involving the collective use of biomaterials, cells and/or bioactive molecules. “Frontiers in Bioengineering and Biotechnology” aspires to be a forum for all people involved in the process by bridging the gap too often existing between a discovery in the basic sciences and its clinical application.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


