Evaluation of microplate handling accuracy for applying robotic arms in laboratory automation
IF 2.5
4区 医学
Q3 BIOCHEMICAL RESEARCH METHODS
引用次数: 0
Abstract
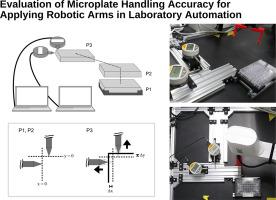
An inexpensive single-arm robot is widely utilized for recent laboratory automation solutions. The integration of a single-arm robot as a transfer system into a semi-automatic liquid dispenser without a transfer system can be realized as an inexpensive alternative to a fully automated liquid handling system. However, there has been no quantitative investigation of the positional accuracy of robot arms required to transfer microplates. In this study, we constructed a platform comprising aluminum frames and digital gauges to facilitate such measurements. We measured the position repeatability of a robot arm equipped with a custom-made finger by repeatedly transferring microplates. Further, the acceptable misalignment of plate transfer was evaluated by adding an artificial offset to the microplate position using this platform. The results of these experiments are expected to serve as benchmarks for the selection of robot arms for laboratory automation in biology. Furthermore, all information for replicating this device will be made publicly available, thereby allowing many researchers to collaborate and accumulate knowledge, hopefully contributing to advances in this field.
评估在实验室自动化中应用机械臂的微孔板处理精度。
廉价的单臂机器人被广泛应用于最新的实验室自动化解决方案中。将单臂机器人作为传送系统集成到不带传送系统的半自动液体分配器中,可作为全自动液体处理系统的廉价替代方案。然而,目前还没有对传送微孔板所需的机械臂位置精度进行定量研究。在本研究中,我们构建了一个由铝制框架和数字量规组成的平台,以方便进行此类测量。通过反复转移微孔板,我们测量了配备定制手指的机械臂的位置重复性。此外,我们还利用该平台为微孔板位置添加了一个人工偏移量,从而评估了可接受的微孔板转移偏差。这些实验结果有望成为选择生物实验室自动化机械臂的基准。此外,复制该装置的所有信息都将公开发布,从而使许多研究人员能够合作并积累知识,希望能对该领域的进步做出贡献。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

SLAS Technology
Computer Science-Computer Science Applications
CiteScore
6.30
自引率
7.40%
发文量
47
审稿时长
106 days
期刊介绍:
SLAS Technology emphasizes scientific and technical advances that enable and improve life sciences research and development; drug-delivery; diagnostics; biomedical and molecular imaging; and personalized and precision medicine. This includes high-throughput and other laboratory automation technologies; micro/nanotechnologies; analytical, separation and quantitative techniques; synthetic chemistry and biology; informatics (data analysis, statistics, bio, genomic and chemoinformatics); and more.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


