A platform-agnostic deep reinforcement learning framework for effective Sim2Real transfer towards autonomous driving
引用次数: 0
Abstract
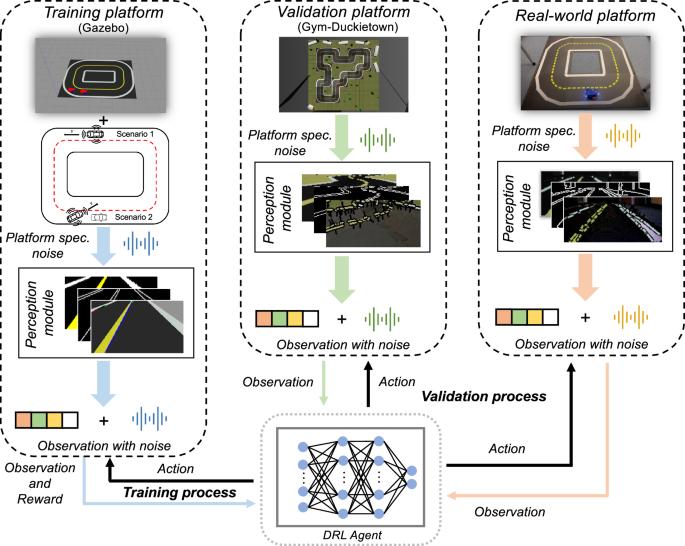
Autonomous driving presents unique challenges, particularly in transferring agents trained in simulation to real-world environments due to the discrepancies between the two. To address this issue, here we propose a robust Deep Reinforcement Learning (DRL) framework that incorporates platform-dependent perception modules to extract task-relevant information, enabling the training of a lane-following and overtaking agent in simulation. This framework facilitates the efficient transfer of the DRL agent to new simulated environments and the real world with minimal adjustments. We assess the performance of the agent across various driving scenarios in both simulation and the real world, comparing it to human drivers and a proportional-integral-derivative (PID) baseline in simulation. Additionally, we contrast it with other DRL baselines to clarify the rationale behind choosing this framework. Our proposed approach helps bridge the gaps between different platforms and the Simulation to Reality (Sim2Real) gap, allowing the trained agent to perform consistently in both simulation and real-world scenarios, effectively driving the vehicle. Dianzhao Li and Ostap Okhrin proposed a deep reinforcement learning framework for transition between various simulated and real-world driving environments. Their method allows for the more effective control of autonomous vehicles in lane following and overtaking tasks.
平台无关的深度强化学习框架,实现自动驾驶的有效 Sim2Real 转移
自动驾驶带来了独特的挑战,尤其是在将模拟训练的代理转移到真实环境方面,因为两者之间存在差异。为解决这一问题,我们在此提出了一个强大的深度强化学习(DRL)框架,该框架结合了与平台相关的感知模块,以提取与任务相关的信息,从而能够在模拟中训练车道跟随和超车代理。该框架有助于将 DRL 代理高效地转移到新的模拟环境和现实世界中,只需做出最小的调整。我们评估了 DRL 代理在模拟和真实世界的各种驾驶场景中的表现,并将其与人类驾驶员和模拟中的比例-积分-派生(PID)基线进行了比较。此外,我们还将其与其他 DRL 基准进行对比,以阐明选择此框架的理由。我们提出的方法有助于弥合不同平台之间的差距以及模拟到现实(Sim2Real)之间的差距,使训练有素的代理在模拟和现实场景中都能表现一致,从而有效地驾驶车辆。Dianzhao Li 和 Ostap Okhrin 提出了一种深度强化学习框架,用于在各种模拟和真实世界驾驶环境之间进行转换。他们的方法可以更有效地控制自动驾驶车辆执行车道跟随和超车任务。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


