Flexible wide-range, sensitive three-axis pressure sensor array for robotic grasping feedback
IF 6.5
Q1 BIOTECHNOLOGY & APPLIED MICROBIOLOGY
引用次数: 0
Abstract
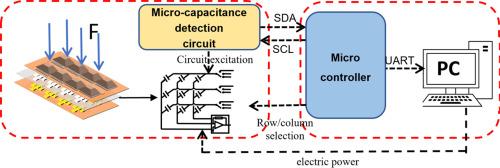
Flexible pressure sensors capable of detecting normal and tangential forces through physical contact have garnered considerable interest in the realm of human-interactive systems. However, simultaneous detection of multi-directional forces is still a challenge for current research. Herein, a capacitive flexible pressure sensor based on a sandwich structure for three-dimensional force detection is proposed. The fabrication process of the sensor array is straightforward, capable of effectively distinguishing between normal and tangential forces. Polyimide (PI) serves as the flexible substrate for depositing the metal electrode pattern, while Polydimethylsiloxane (PDMS) acts as the intermediate dielectric layer material and the three-dimensional force conduction block. Through a comparative study of the thickness of the hollow dielectric layer, a pressure sensor with superior performance was prepared, featuring high sensitivity across a wide working range. Test results demonstrate its capability to detect normal forces ranging from 0 to 46 N (0–520 kPa) with a sensitivity of 0.442 N−1 (0.031 kPa−1) and tangential forces from 0 to 10 N with a sensitivity of 0.08 N−1 (X-axis) and 0.07 N−1 (Y-axis). The designed acquisition system can simultaneously gather data from 6 sensor arrays, totaling 240 channels, with a response time of 11 ms. This sensor array, characterized by flexibility, versatility, and a wide range, is suitable for applications in robot tactile perception.
用于机器人抓取反馈的灵活、宽范围、灵敏的三轴压力传感器阵列
能够通过物理接触检测法向力和切向力的柔性压力传感器在人机交互系统领域引起了广泛关注。然而,同时检测多方向力仍然是当前研究的一个挑战。本文提出了一种基于三明治结构的电容式柔性压力传感器,用于三维力检测。传感器阵列的制作过程简单明了,能够有效区分法向力和切向力。聚酰亚胺(PI)是沉积金属电极图案的柔性基底,而聚二甲基硅氧烷(PDMS)则是中间介电层材料和三维力传导块。通过对中空介电层厚度的比较研究,制备出了一种性能优越的压力传感器,其特点是在宽工作范围内具有高灵敏度。测试结果表明,它能够检测 0 至 46 N(0-520 kPa)的法向力,灵敏度为 0.442 N-1(0.031 kPa-1);检测 0 至 10 N 的切向力,灵敏度为 0.08 N-1(X 轴)和 0.07 N-1(Y 轴)。所设计的采集系统可同时从 6 个传感器阵列(共 240 个通道)采集数据,响应时间为 11 毫秒。该传感器阵列具有灵活性、多功能性和宽范围的特点,适用于机器人触觉感知方面的应用。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Sensors and Actuators Reports
Multiple-
CiteScore
9.60
自引率
0.00%
发文量
60
审稿时长
49 days
期刊介绍:
Sensors and Actuators Reports is a peer-reviewed open access journal launched out from the Sensors and Actuators journal family. Sensors and Actuators Reports is dedicated to publishing new and original works in the field of all type of sensors and actuators, including bio-, chemical-, physical-, and nano- sensors and actuators, which demonstrates significant progress beyond the current state of the art. The journal regularly publishes original research papers, reviews, and short communications.
For research papers and short communications, the journal aims to publish the new and original work supported by experimental results and as such purely theoretical works are not accepted.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


