Backward motion suppression in space-constrained piezoelectric pipeline robots
IF 7.1
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2024-10-05
DOI:10.1016/j.ijmecsci.2024.109746
引用次数: 0
Abstract
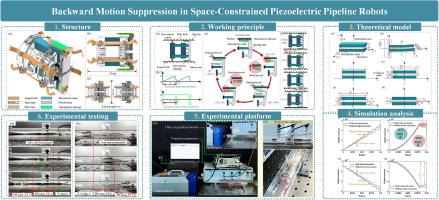
In response to the current challenges of detecting micro pipelines, a micro pipeline robot based on the principle of piezoelectric inertia stick-slip drive was proposed in this paper, which can be effectively applied to the detection and maintenance of micro pipelines. However, during the analysis of the robot's displacement trajectory, it was observed that using inertial drive could cause the backward motion of the robot. This may adversely affect the accuracy and stability of the robot's operation within the micro pipelines. Therefore, a novel control method is derived from the original pipeline robot structure. By affixing piezoelectric sheets to the driving feet of the robot to adjust their deformation and subsequently employing collaborative control of piezoelectric sheets and piezoelectric stacks to regulate friction between the driving feet and the pipe wall, the backward motion of the robot was effectively mitigated. Compared to existing backward motion suppression methods, the approach proposed in this paper has a minimal impact on the actuator's size, allowing for flexible adaptation to various space-constrained applications, while also offering the advantage of a simple control strategy. After determining the structure and working principle, deformation analysis of the driving foot and dynamic simulation analysis of the driving system were conducted. These analyses provide insights into the relationship between mechanical and electrical parameters and output performance within the driving system, thereby validating the feasibility of the control method. Subsequently, a prototype was fabricated, and its output performance was tested. Results demonstrate that this control method can effectively suppress inertial backward motion, achieving a suppression rate close to 100 %. This research presents a novel idea and methodology for mitigating the backward motion of piezoelectric inertial stick-slip actuators with driving foot structures.
空间受限压电管道机器人的后向运动抑制
针对当前微型管道检测面临的挑战,本文提出了一种基于压电惯性粘滑驱动原理的微型管道机器人,可有效应用于微型管道的检测和维护。然而,在对机器人位移轨迹进行分析时发现,使用惯性驱动会导致机器人向后运动。这可能会对机器人在微型管道内运行的精度和稳定性造成不利影响。因此,在原有管道机器人结构的基础上衍生出一种新的控制方法。通过在机器人的驱动脚上粘贴压电片来调节其变形,然后利用压电片和压电叠层的协同控制来调节驱动脚与管壁之间的摩擦,从而有效地减缓了机器人的后退运动。与现有的后向运动抑制方法相比,本文提出的方法对致动器的尺寸影响极小,可灵活适应各种空间受限的应用,同时还具有控制策略简单的优势。在确定了结构和工作原理后,对驱动脚进行了变形分析,并对驱动系统进行了动态模拟分析。这些分析深入揭示了驱动系统内机械和电气参数与输出性能之间的关系,从而验证了控制方法的可行性。随后,制作了一个原型,并对其输出性能进行了测试。结果表明,这种控制方法能有效抑制惯性后退运动,抑制率接近 100%。本研究提出了一种新颖的思路和方法,用于减轻具有驱动脚结构的压电惯性粘滑致动器的后向运动。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


