Yu Xie, Jing Pan, Longteng Yu, Hubiao Fang, Shaoliang Yu, Ning Zhou, Limin Tong, Lei Zhang
{"title":"Optical Micro/Nanofiber Enabled Multiaxial Force Sensor for Tactile Visualization and Human–Machine Interface","authors":"Yu Xie, Jing Pan, Longteng Yu, Hubiao Fang, Shaoliang Yu, Ning Zhou, Limin Tong, Lei Zhang","doi":"10.1002/advs.202404343","DOIUrl":null,"url":null,"abstract":"<p>Tactile sensors with capability of multiaxial force perception play a vital role in robotics and human–machine interfaces. Flexible optical waveguide sensors have been an emerging paradigm in tactile sensing due to their high sensitivity, fast response, and antielectromagnetic interference. Herein, a flexible multiaxial force sensor enabled by U-shaped optical micro/nanofibers (MNFs) is reported. The MNF is embedded within an elastomer film topped with a dome-shaped protrusion. When the protrusion is subjected to vector forces, the embedded MNF undergoes anisotropic deformations, yielding time-resolved variations in light transmission. Detection of both normal and shear forces is achieved with sensitivities reaching 50.7 dB N<sup>−1</sup> (14% kPa<sup>−1</sup>) and 82.2 dB N<sup>−1</sup> (21% kPa<sup>−1</sup>), respectively. Notably, the structural asymmetry of the MNF induces asymmetrical optical modes, granting the sensor directional responses to four-directional shear forces. As proof-of-concept applications, tactile visualizations for texture and relief pattern recognition are realized with a spatial resolution of 160 µm. Moreover, a dual U-shaped MNF configuration is demonstrated as a human–machine interface for cursor manipulation. This work represents a step towards advanced multiaxial tactile sensing.</p>","PeriodicalId":117,"journal":{"name":"Advanced Science","volume":"11 45","pages":""},"PeriodicalIF":14.1000,"publicationDate":"2024-10-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/advs.202404343","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Science","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202404343","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
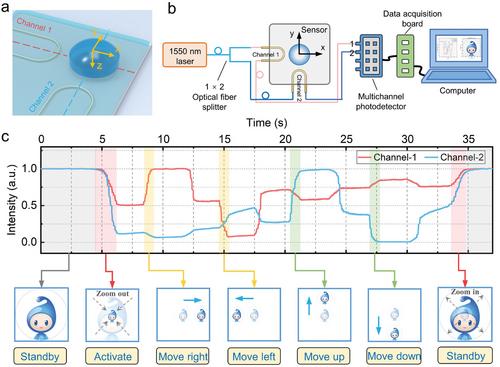
Tactile sensors with capability of multiaxial force perception play a vital role in robotics and human–machine interfaces. Flexible optical waveguide sensors have been an emerging paradigm in tactile sensing due to their high sensitivity, fast response, and antielectromagnetic interference. Herein, a flexible multiaxial force sensor enabled by U-shaped optical micro/nanofibers (MNFs) is reported. The MNF is embedded within an elastomer film topped with a dome-shaped protrusion. When the protrusion is subjected to vector forces, the embedded MNF undergoes anisotropic deformations, yielding time-resolved variations in light transmission. Detection of both normal and shear forces is achieved with sensitivities reaching 50.7 dB N−1 (14% kPa−1) and 82.2 dB N−1 (21% kPa−1), respectively. Notably, the structural asymmetry of the MNF induces asymmetrical optical modes, granting the sensor directional responses to four-directional shear forces. As proof-of-concept applications, tactile visualizations for texture and relief pattern recognition are realized with a spatial resolution of 160 µm. Moreover, a dual U-shaped MNF configuration is demonstrated as a human–machine interface for cursor manipulation. This work represents a step towards advanced multiaxial tactile sensing.
期刊介绍:
Advanced Science is a prestigious open access journal that focuses on interdisciplinary research in materials science, physics, chemistry, medical and life sciences, and engineering. The journal aims to promote cutting-edge research by employing a rigorous and impartial review process. It is committed to presenting research articles with the highest quality production standards, ensuring maximum accessibility of top scientific findings. With its vibrant and innovative publication platform, Advanced Science seeks to revolutionize the dissemination and organization of scientific knowledge.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


