Magnetic alginate microrobots with dual-motion patterns through centrifugally driven flow control
IF 7.6
2区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
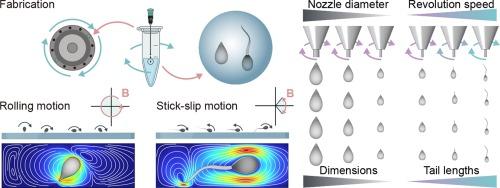
Mobile microrobots have gained increasing attention in biomedical applications because they can be precisely actuated to targeted positions in a tiny space. However, their use in biomedical applications is hindered by the costly and complicated fabrication method. Herein, a facile fabrication method is proposed to produce magnetic alginate microrobots with adjustable dimensions, including teardrop and tadpole shapes, via tunable centrifugally-driven flows. The formation of these microrobots is interpreted by finite element analysis, revealing that the transition between the dripping and jetting regimes of the flow alters the microrobot's shape. The dimensions of the microrobots are quantitatively analyzed based on the flow's extrusion velocity, controlled by nozzle diameters and revolution speeds. Incorporating magnetic nanoparticles into the alginate-based hydrogel enables the microrobots to exhibit distinct motion patterns under a magnetic field. The teardrop-like microrobot can reach a maximum rolling velocity of approximately 2.7 body length s−1 at 2 Hz, while the maximum stick-slip velocity of the tadpole-like microrobot reaches about 0.42 body length s−1 at 5 Hz, comparable to the existing bioinspired magnetic microrobots. These two motion patterns allow the microrobot to overcome obstacles and navigate in vertically constrained environments, respectively. Last, an ultrasound imaging system is deployed to monitor the locomotion and degradation of the microrobots, showing their potential for targeted drug delivery applications.
通过离心驱动流量控制实现双运动模式的磁性藻酸盐微型机器人
移动微型机器人可以在极小的空间内被精确地驱动到目标位置,因此在生物医学应用领域受到越来越多的关注。然而,它们在生物医学领域的应用却受到昂贵而复杂的制造方法的阻碍。本文提出了一种简便的制造方法,通过可调的离心驱动流动,制造出尺寸可调的磁性藻酸盐微机器人,包括水滴形和蝌蚪形。有限元分析解释了这些微机器人的形成过程,揭示了流动的滴流和喷射状态之间的转换会改变微机器人的形状。根据由喷嘴直径和旋转速度控制的水流挤压速度,对微机器人的尺寸进行了定量分析。在藻酸盐水凝胶中加入磁性纳米粒子,可使微机器人在磁场作用下表现出独特的运动模式。水滴型微机器人在2赫兹时的最大滚动速度约为2.7体长/秒,而蝌蚪型微机器人在5赫兹时的最大粘滑速度约为0.42体长/秒,与现有的生物启发磁性微机器人相当。这两种运动模式使微机器人能够分别克服障碍和在垂直受限环境中导航。最后,利用超声波成像系统监控微机器人的运动和退化情况,显示了它们在靶向药物输送应用方面的潜力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Materials & Design
Engineering-Mechanical Engineering
CiteScore
14.30
自引率
7.10%
发文量
1028
审稿时长
85 days
期刊介绍:
Materials and Design is a multi-disciplinary journal that publishes original research reports, review articles, and express communications. The journal focuses on studying the structure and properties of inorganic and organic materials, advancements in synthesis, processing, characterization, and testing, the design of materials and engineering systems, and their applications in technology. It aims to bring together various aspects of materials science, engineering, physics, and chemistry.
The journal explores themes ranging from materials to design and aims to reveal the connections between natural and artificial materials, as well as experiment and modeling. Manuscripts submitted to Materials and Design should contain elements of discovery and surprise, as they often contribute new insights into the architecture and function of matter.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


